利用PCL中分割算法、
pcl::SACSegmentation<pcl::PointXYZ> seg;
,不利用法线参数,只根据模型参数得到的分割面片,与想象的面片差距很大,
1 pcl::ModelCoefficients::Ptr coefficients (new pcl::ModelCoefficients ()); 2 pcl::PointIndices::Ptr inliers (new pcl::PointIndices ()); 3 // 创建分割对象 4 pcl::SACSegmentation<pcl::PointXYZ> seg; 5 // 可选 6 seg.setOptimizeCoefficients (true); 7 // 必选 8 seg.setModelType (pcl::SACMODEL_PLANE); 9 seg.setMethodType (pcl::SAC_RANSAC); 10 seg.setMaxIterations (1000); 11 seg.setDistanceThreshold (0.05);
后我采用RANSAC拟合的方法,进行面片的分割
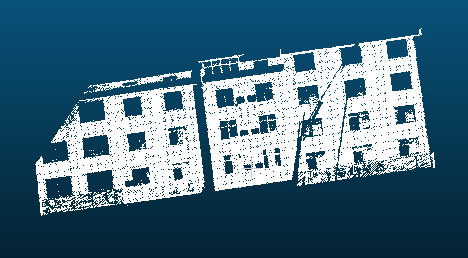
1 std::vector<int> inliers; //存储局内点集合的点的索引的向量 2 3 //进行RANSAC平面拟合 4 pcl::SampleConsensusModelPlane<PointT>::Ptr model_p(new pcl::SampleConsensusModelPlane<PointT>(cloud)); //针对平面模型的对象 5 pcl::RandomSampleConsensus<PointT> ransacP(model_p); 6 ransacP.setDistanceThreshold(.1); //与平面距离小于0.1的点作为局内点考虑 7 ransacP.computeModel(); //执行随机参数估计 8 ransacP.getInliers(inliers); //存储估计所得的局内点 9 pcl::copyPointCloud<PointT>(*cloud, inliers, *cloud_in); //复制估算模型的所有局内点到cloud_in中 10 pcl::io::savePCDFile("./data/seg_RAN/RANSAC_building_1.pcd", *cloud_in);
得到:
之后我想迭代的进行面片拟合后分割出来,在索引的地方遇到了问题
于是想出来一个比较笨的办法:
1 for (int i = 0; i < cloud->points.size(); i++) 2 { 3 std::vector<int>::iterator iter = find(inliers.begin(), inliers.end(), i); 4 if (iter == inliers.end()) 5 { 6 cloud_out->points.push_back(cloud->points.at(i)); 7 } 8 }
等同于自己写了一个分割的方法。
中间遇到的问题有:
点云的索引、有序点云与无序点云的写入、智能指针未实例化问题、
现在仍未搞明白PCL中的索引的使用方法。例如:PointIndices、 ExtractIndices 等
如有了解的小伙伴希望告知、互帮互助、共同进步!
2019-04-12 19:04:34