1. Anchor/PriorBox
Faster RCNN:首先在第一个阶段对固定的Anchor进行了位置修正与筛选, 得到感兴趣区域后, 在第二个阶段再对该区域进行分类与回归;
SSD: 直接将固定大小宽高的PriorBox作为先验的感兴趣区域, 利用一个阶段完成了分类与回归;PriorBox本质上是在原图上的一系列矩形框, 如图5.7所示。 某个特征图上的一个点根据下采样率可以得到在原图的坐标, SSD先验性地提供了以该坐标为中心的4个或6个不同大小的PriorBox, 然后利用特征图的特征去预测这4个PriorBox的类别与位置偏移量。
在Faster RCNN中, 所有Anchors对应的特征都来源于同一个特征图, 而该层特征的感受野相同, 很难处理被检测物体的尺度变化较大的情况, 多个大小宽高的Anchors能起到的作用也有限。
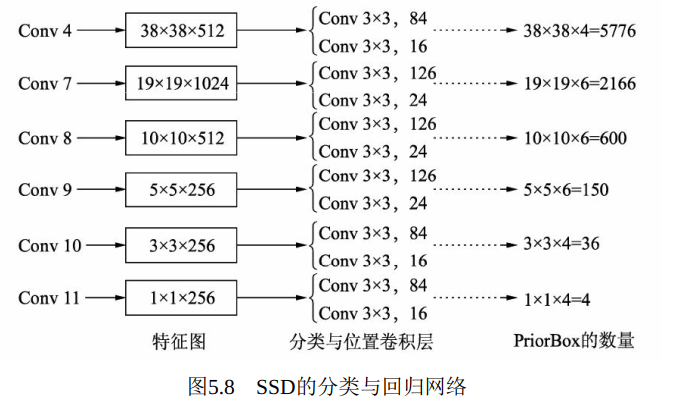
在深度卷积网络中, 浅层的特征图拥有较小的感受野, 深层的特征图拥有较大的感受野, 因此SSD充分利用了这个特性, 使用了多层特征图来做物体检测, 浅层的特征图检测小物体, 深层的特征图检测大物体.如图5.8所示