
目标:
在STM32F429 Disco开发板上用FreeRTOS双线程点亮双闪led。
准备:
0. STM32F429i-DISCO
1. keil ARMMDK 5.13
2. STM32CubeMX 4.8
步骤:
1. 建立工程
keil - project - new project
2. 保存在硬盘上, 给工程起名字

3. 保存工程
同时弹出了器件选择界面, 选STM32F429ZITx
4. 上面界面点OK后出来了运行环境配置界面

展开CMSIS:RTOS and enable :Keil RTX :
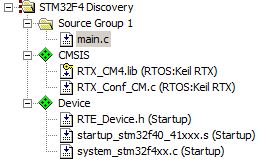
Validation Output 区域显示了依赖组件, 点Resolve,然后OK
现在,需求的组件被添加进了工程(startup , RTX config, CMSIS系统文件)
5. GPIO和时钟配置。
打开cube
选好器件


配置时钟

然后生成代码
我要的是时钟的初始化和gpio的初始化


/** System Clock Configuration */ void SystemClock_Config(void) { RCC_OscInitTypeDef RCC_OscInitStruct; RCC_ClkInitTypeDef RCC_ClkInitStruct; __PWR_CLK_ENABLE(); __HAL_PWR_VOLTAGESCALING_CONFIG(PWR_REGULATOR_VOLTAGE_SCALE1); RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE; RCC_OscInitStruct.HSEState = RCC_HSE_ON; RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON; RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE; RCC_OscInitStruct.PLL.PLLM = 8; RCC_OscInitStruct.PLL.PLLN = 336; RCC_OscInitStruct.PLL.PLLP = RCC_PLLP_DIV2; RCC_OscInitStruct.PLL.PLLQ = 4; HAL_RCC_OscConfig(&RCC_OscInitStruct); RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_SYSCLK|RCC_CLOCKTYPE_PCLK1 |RCC_CLOCKTYPE_PCLK2; RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK; RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1; RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV4; RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV2; HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_5); HAL_SYSTICK_Config(HAL_RCC_GetHCLKFreq()/1000); HAL_SYSTICK_CLKSourceConfig(SYSTICK_CLKSOURCE_HCLK); }
/** Configure pins as * Analog * Input * Output * EVENT_OUT * EXTI */ void MX_GPIO_Init(void) { GPIO_InitTypeDef GPIO_InitStruct; /* GPIO Ports Clock Enable */ __GPIOH_CLK_ENABLE(); __GPIOG_CLK_ENABLE(); /*Configure GPIO pins : PG13 PG14 */ GPIO_InitStruct.Pin = GPIO_PIN_13|GPIO_PIN_14; GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP; GPIO_InitStruct.Pull = GPIO_NOPULL; GPIO_InitStruct.Speed = GPIO_SPEED_LOW; HAL_GPIO_Init(GPIOG, &GPIO_InitStruct); }
把这两段代码加进main.c,并调用
6. 配置FreeRtos的时钟
打开RTX_Conf_CM.c文件, 文件下面有个configuration标签, 在这里配置168M时钟和上面匹配

8. 添加main函数
右键Source group 1, 选Add New Item to Group

Select User Code Template and click on “CMSIS-RTOS ‘main’ function”. Click Add.
9. Edit the main program code. First add the CMSIS-RTOS RTX header. Right-click on a blank line at the beginning of the file main.c and from popup menu select Insert ‘#include files’. Include the header file cmsis_os.h.
10. Hal驱动

11. 写应用代码
添加LED.h, LED.H
/*------------------------------------------------------------------------ * File LED.h *----------------------------------------------------------------------*/ void Init_BlinkyThread ( void ); // Initialize thread
/*------------------------------------------------------------------------ * File LED.c *----------------------------------------------------------------------*/ #include "stm32f4xx.h" // Device header #include "cmsis_os.h" // RTOS:Keil RTX header #include "LED.h" #include "stm32f4xx_hal.h" // Prototype function void LEDG_blink(void const *argument); void LEDR_blink(void const *argument); // Define blinky thread osThreadDef (LEDG_blink, osPriorityNormal, 1, 0); osThreadDef (LEDR_blink, osPriorityNormal, 1, 0); void LEDG_blink(void const *argument) { for (;;) { HAL_GPIO_WritePin(GPIOG, GPIO_PIN_13, GPIO_PIN_SET); osDelay (500); // Delay 500 ms HAL_GPIO_WritePin(GPIOG, GPIO_PIN_13, GPIO_PIN_RESET); osDelay (500); // Delay 500 ms } } void LEDR_blink(void const *argument) { for (;;) { HAL_GPIO_WritePin(GPIOG, GPIO_PIN_14, GPIO_PIN_SET); osDelay (300); // Delay 500 ms HAL_GPIO_WritePin(GPIOG, GPIO_PIN_14, GPIO_PIN_RESET); osDelay (300); // Delay 500 ms } } void Init_BlinkyThread (void) { osThreadCreate (osThread(LEDR_blink), NULL); // Create thread osThreadCreate (osThread(LEDG_blink), NULL); // Create thread }
12. 在main.c里面调用
/* * main: initialize and start the system */ int main (void) { SystemClock_Config(); MX_GPIO_Init(); osKernelInitialize (); // Initialize CMSIS-RTOS // create 'thread' functions that start executing, // example: tid_name = osThreadCreate (osThread(name), NULL); Init_BlinkyThread (); // Start Blinky thread //osThreadCreate (osThread(blink_LED), NULL); // Create thread osKernelStart (); // Start thread execution while (1); }