LED灯:

DS18B20温度传感器
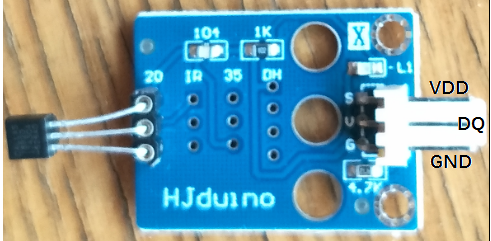
DS18B20是DALLAS公司生产的一种常用的温度传感器,其具有体积小巧、硬件功耗低、抗干扰能力强、精准度高的特点。该传感器具有单总线通讯的能力,电压范围为3.0V~5.5V,测量温度在-55℃~+125℃之间
接线:s接扩展板的A0-A5模拟端口或PWM端口
LCD1602液晶显示器


典型的16×2LCD可以显示两行字符,每个字符像素组成为5×8
引脚接口说明表:

2.VDD接+5V电源。
3.VL为对LCD显示器对比度调整端,接正电源时对比度最低,接地时对比度最高,对比度过高时会产生方块,使用时可以通过一个0~20K的电位器调整对比度
4.RS为寄存器选择,高电平时选择数据寄存器、低电平时选择指令寄存器。
5.R/W为读写信号线,高电平为读操作,低电平为写操作。当RS和R/W共同为低电平可以写入指令或显示地址,当RS为低电平R/W为高电平可以读出信号,当RS为高电平R/W为低电平可以写入数据
6.E为使能端,当使能端由高电平跳变成低电平时,液晶模块执行命令。
15.BLA为背光源正极,在这里接3.3V电源。
1602LCD显示器基本操作:

接线:
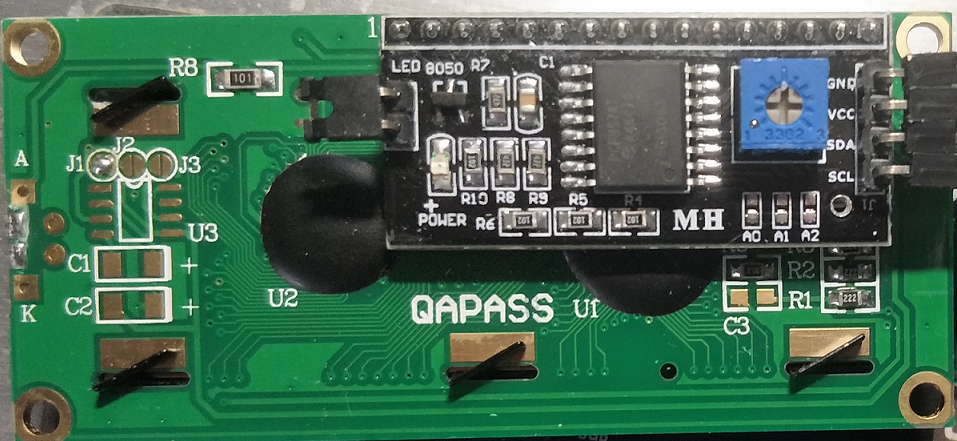
 【通过PCF8574T转接板】
【通过PCF8574T转接板】
通过设置跳线还可以设置地址: 0x20-0x27。模块背面可以看到一块蓝色的电位器,旋转它可以调节1602液晶显示器的对比度
SDA和SCL分别为iic通讯的数据线和时钟线
需要 LiquidCrystal_I2C 库
GND接G VCC接V SDA接A4和SCL接A5
电位器potentiometer:

-
- 供电电压:5V 电位器阻值:B10K
蜂鸣器:


高电平驱动蜂鸣器发声
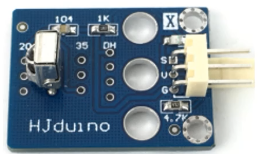
碰撞开关:

模块在通电状态下,前方有物体撞上开关时,模块输出低电平0,没有碰撞时输出高电平1
单向倾斜开关:
一边倾斜时输出高电平1,另一边倾斜时输出低电平0
声音检测模块:

声音大到一定程度时输出低电平0
按钮模块:
按钮按下时输出低电平0
人体触摸开关:

人体触摸时输出低电平0---(低电平 高电平间隔输出)
热敏感应模块:
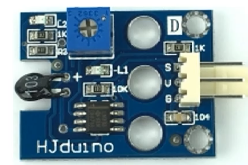
需要调整报警温度
到达报警温度时输出低电压
到达报警温度时模块中的L1灯也会亮
火焰检测模块:

火焰传感器可以用来探测火源或其它波长在760纳米~1100纳米范围内的光源。在灭火机器人比赛中,火焰探头起着非常重要的作用,它可以用作机器人的眼睛来寻找火源或足球。利用它可以制作灭火机器人、足球机器人等。 火焰传感器的探测角度达60度,对火焰光谱特别灵敏。 这款火焰传感器能在-25到85摄氏度下工作,性能稳定可靠。尽管这款传感器是用来感知火焰,但是它并不防火。因此使用时请与火焰保持距离,以免烧坏传感器
可以调节红外线的报警强度
红外线达到一定强度后,就输出低电平
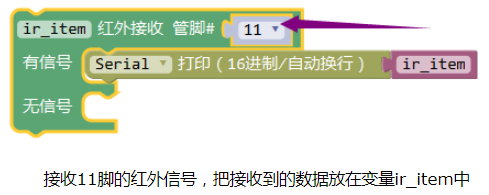
红外接收模块:
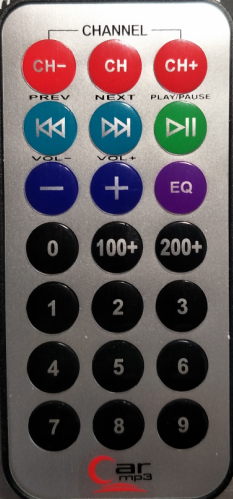 与这个红外遥控器配合使用
与这个红外遥控器配合使用
能接收38K红外线信号
插在PWM脚上使用
遥控器发出的PWM信号:
CH- FFA25D
CH FF629D
CH+ FFE21D
![]() FF22DD
FF22DD
 FF02FD
FF02FD
 FFC23D
FFC23D
 FFE01F
FFE01F
 FFA857
FFA857
 FF906F
FF906F
0 FF6897
100+ FF9867
200+ FFB04F
1 FF30CF
2 FF18E7
3 FF7A85
4 FF10EF
5 FF38C7
6 FF5AA5
7 FF42BD
8 FF4AB5
9 FF52AD
风扇:
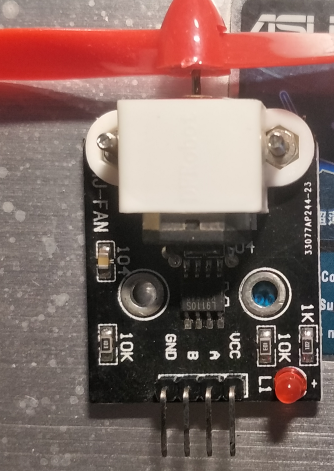
AB选择一个就行--连接数字端口;高电平转动
舵机:

s接模拟口或PWM脚
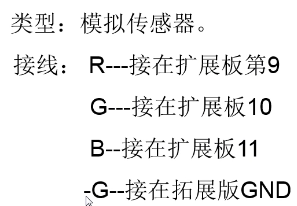
水位探测模块:
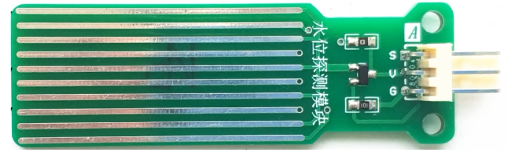
S接模拟脚
水位不同,返回的模拟值不同
土壤湿度传感器:

S接模拟脚
湿度越高 数值越高
超声波模块:

工作原理


Trig 和 Echo 分别接模拟脚

返回的数据:传感器到障碍物的距离(两位小数),个人感觉:误差0.5厘米
RGB模块:
根据RGB的不同数值,可以发出不同的颜色
例子:
volatile int i1; volatile int i2; volatile int i3; void setup(){ i1 = 0; i2 = 0; i3 = 0; } void loop(){ i1 = random(0, 256); i2 = random(0, 256); i3 = random(0, 256); analogWrite(9,i1);//给9号脚的R赋值 analogWrite(10,i2); analogWrite(11,i3); delay(500); }
四位数码管:
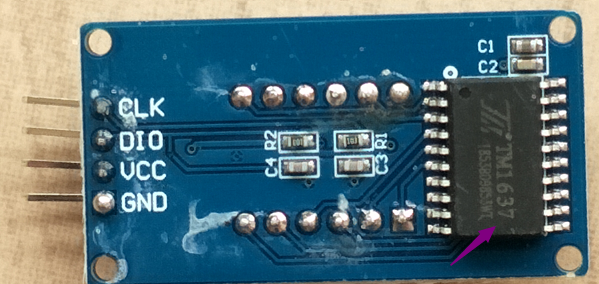
数码管型号:看芯片---1637
DIO和CLK连接模拟口或PWM口
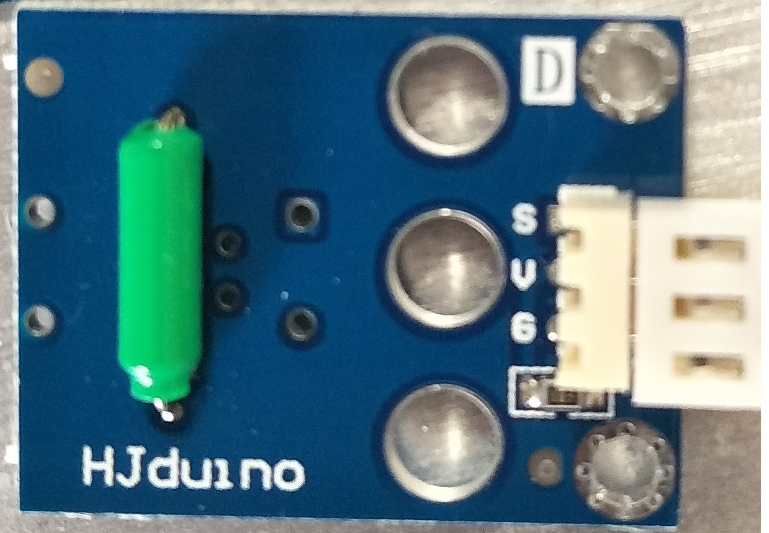
晃动模块:
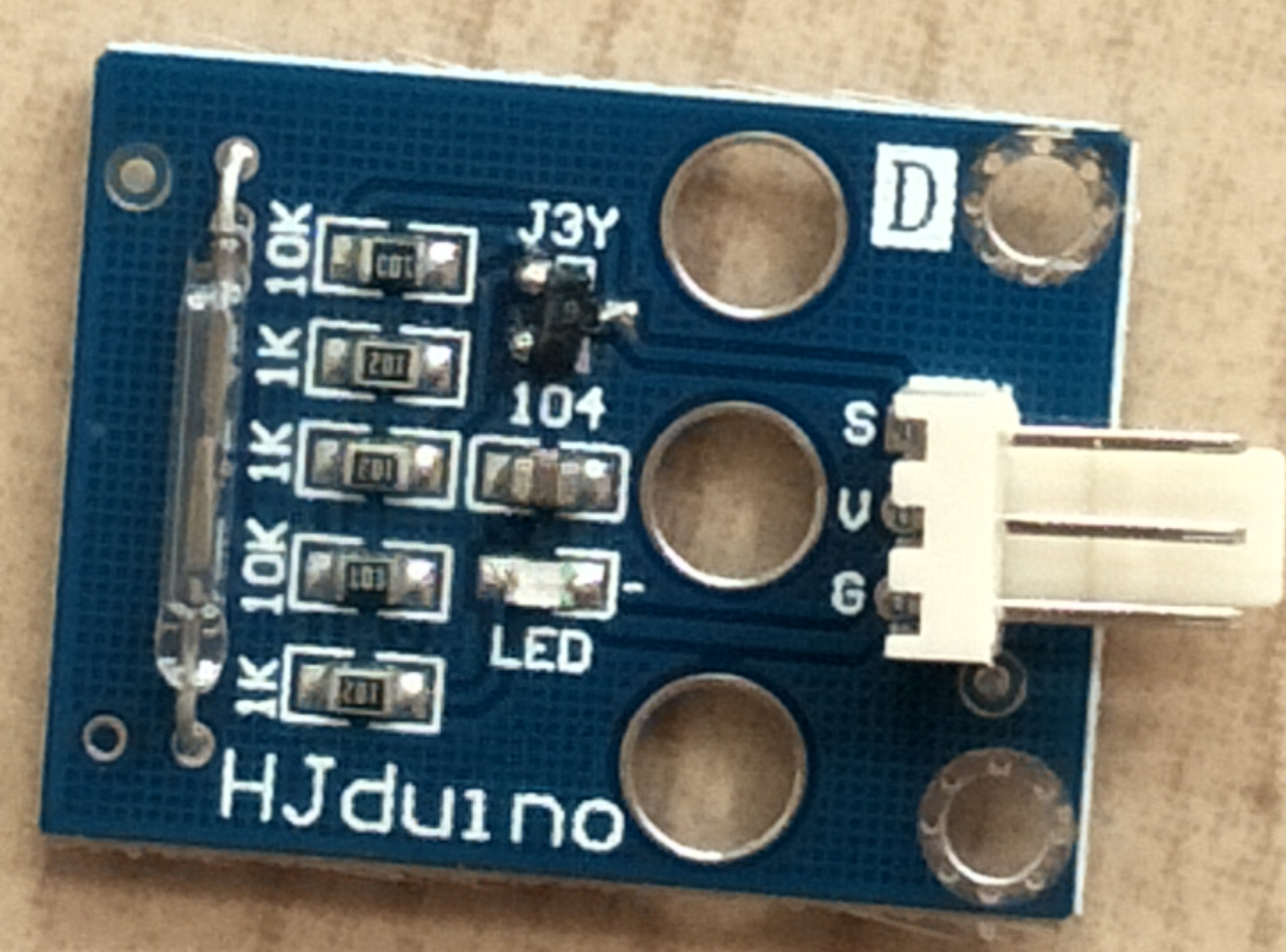
s接数字口
没晃动输出1 晃动输出0 这个模块有缺陷--晃动程度要强
人体检测模块---运动检测模块
有物体移动时,返回1;没有物体移动时,返回0
温湿度传感器DH11:

s接pwm货模拟口
返回值 整数
DH11 不准
天子骄龙