ROS安装最好在ROS wiki上查看相关步骤,是最好的。
或者参照以下程序:(也是摘抄自ROS wiki)
1.添加 sources.list
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
设置你的电脑可以从 packages.ros.org 接收软件.
2.添加 keys
sudo apt-key adv --keyserver hkp://ha.pool.sks-keyservers.net:80 --recv-key 421C365BD9FF1F717815A3895523BAEEB01FA116
如果你遇到连接到keyserver的问题,你可以在以上命令尝试替换hkp://pgp.mit.edu:80或hkp://keyserver.ubuntu.com:80。
3.安装
sudo apt-get update
sudo apt-get install ros-kinetic-desktop-full
4.初始化 rosdep
sudo rosdep init
rosdep update
5.环境配置
如果每次打开一个新的终端时ROS环境变量都能够自动配置好(即添加到bash会话中),那将会方便很多:
echo "source /opt/ros/kinetic/setup.bash" >> ~/.bashrc
source ~/.bashrc
6.构建工厂依赖
到目前为止,你已经安装了运行核心ROS包所需的内容。为了创建和管理自己的ROS工作区,有各种各样的工具和需求分别分布。例如:rosinstall是一个经常使用的命令行工具,它使你能够轻松地从一个命令下载许多ROS包的源树。
要安装这个工具和其他构建ROS包的依赖项,请运行:
sudo apt-get install python-rosinstall python-rosinstall-generator python-wstool build-essential
7.查看工厂状态
roscore
会显示以下界面
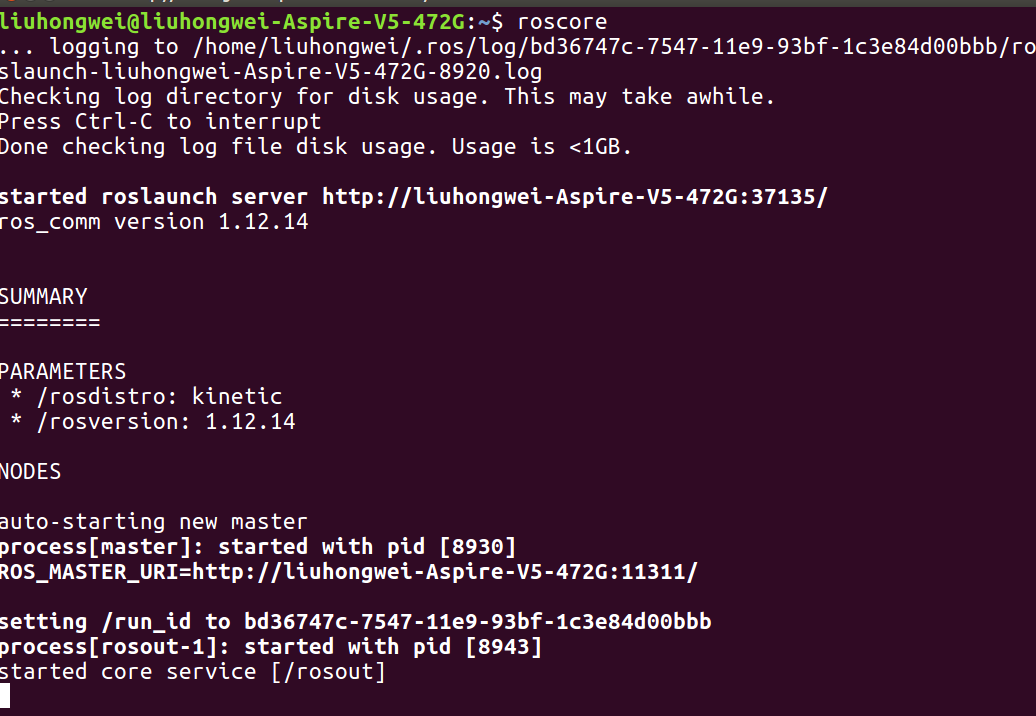
至此已完成如下操作。