1. 串口驱动的安装
我们的开发板使用了 CH340G 的 USB 转串口芯片。通过 USB 线把开发板接到电脑上:
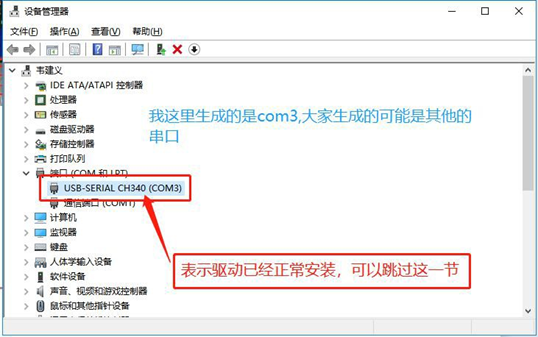
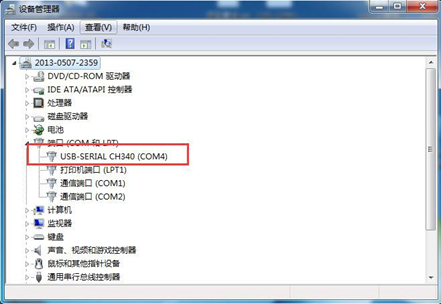
接着查看电脑的设备管理器,如下图表示驱动已经正确安装,可以跳过这一节:
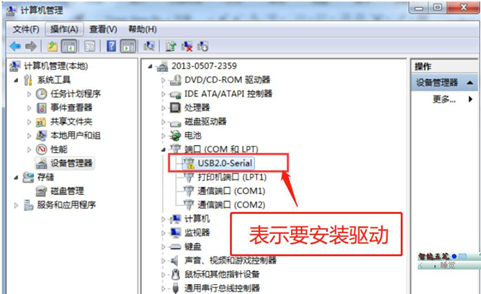
如下图,表示要安装驱动:
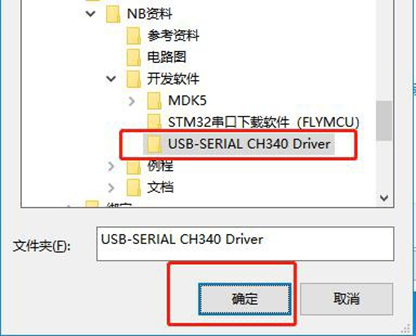
安装驱动步骤一:CH340 串口驱动位置:.开发软件USB-SERIAL CH340 Driver.rar,解压后如下:

安装驱动步骤二:把开发板通过 USB 线接到电脑上(要打开开发板电源),提示安装驱动如下:
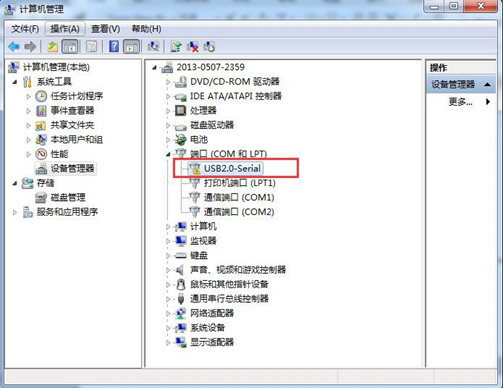
安装驱动步骤三:打开电脑的设备管理器,查看串口的驱动是否已自动安装,如下图是未安装的。
安装驱动步骤四:右键更新驱动,如下图:

安装驱动步骤五:选择第一步解压好的目录:
安装驱动步骤六:选择确定后,有可能会出现以下的提示,选择“始终安装此驱动程序软件”。

安装驱动步骤七:安装完成后,设备管理器,如下图:
串口驱动程序安装好之后,关于串口程序下载和调试,后面会陆续讲解。
2.编译环境搭建
BL602&BL604的编译环境为linux环境,WIN10用户可选linux子系统进行开发
- 准备一台Linux主机,win10用户可使用Liunx子系统
- 打开终端,安装make,命令sudo apt-get install make国内用户可更改镜像源,加快安装速度
- 安装git,命令sudo apt-get install git
- 克隆仓库git clone https://github.com/SmartArduino/Doiting_BL.git
- 修改权限,运行以下两条命令
- chmod -R 777 ./Doiting_BL/bl_iot_sdk/toolchain/
find ./Doiting_BL/bl_iot_sdk/customer_app -name "genromap"|xargs chmod 777
GitHub下载速度较慢,可通过网盘下载完整的SDK:
链接: https://pan.baidu.com/s/123dQAG2lBEDT8VbtzN0TFQ
提取码: d4qw
下载好SDK后,配置系统环境变量
- 打开Linux终端,配置profile文件,命令vim ~/.profile
- 添加环境变量,填写真实的路径export BL60X_SDK_PATH="$HOME/Doiting_BL/bl_iot_sdk"

3.测试编译环境
以下使用hello-world为例
工具链已放在SDK中,无需再下载工具链,SDK环境配置好后可直接编译
进入例程目录,命令cd Doiting_BL/bl_iot_sdk/customer_app/sdk_app_helloworld/
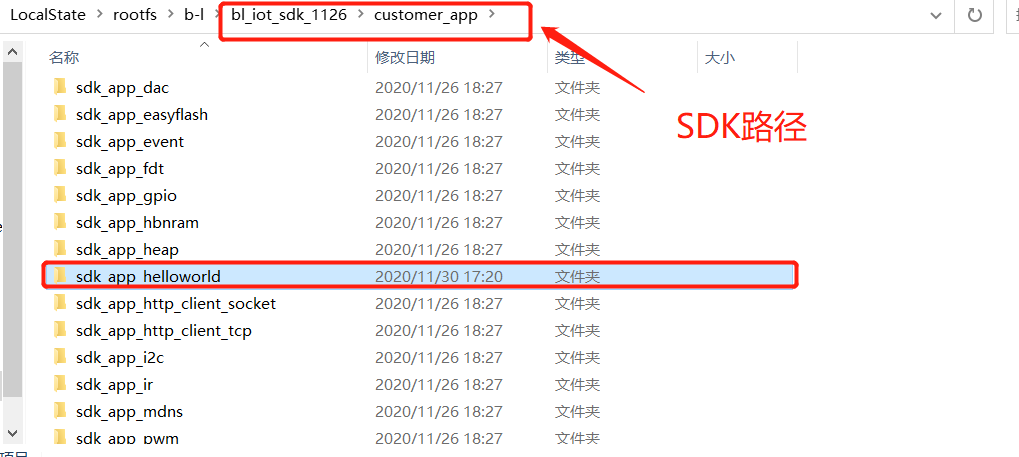
使用项目提供的sh脚本进行编译,命令./genromap
编译完成提示:
Generating BIN File to /home/hogc/Doiting_BL/bl/bl_iot_sdk/ customer_app/sdk_app_helloworld/build_out/sdk_app_helloworld.bin
Building Finish. To flash build output.
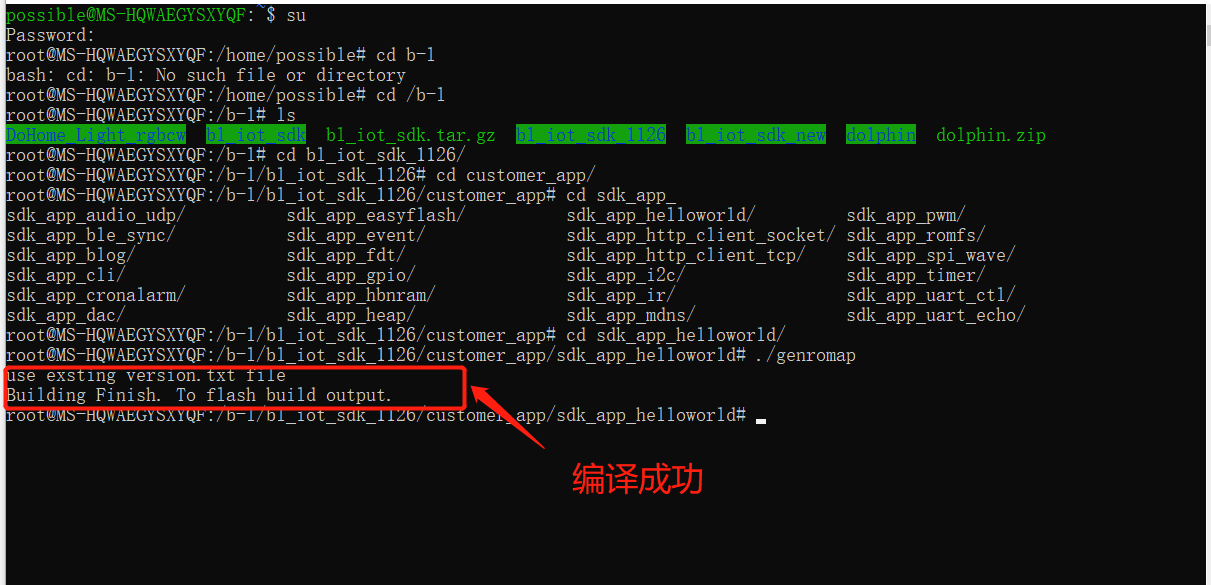
如果能编译成功说明环境搭建没有问题,如果编译失败请检查SDK路径是否配置正确。