1.把小车架空,平放在地板上,注意四个轮子一定要悬空。用资料里的虚拟机,打开一个终端 ssh 过去主控端启动 roslaunch znjrobot bringup.launch。

2.在虚拟机端再打开一个终端,ssh 过去主控端启动rosrun znj_pid pid_configure

3.在虚拟机端再打开一个终端,直接启动 rosrunrqt_reconfigure rqt_reconfigure

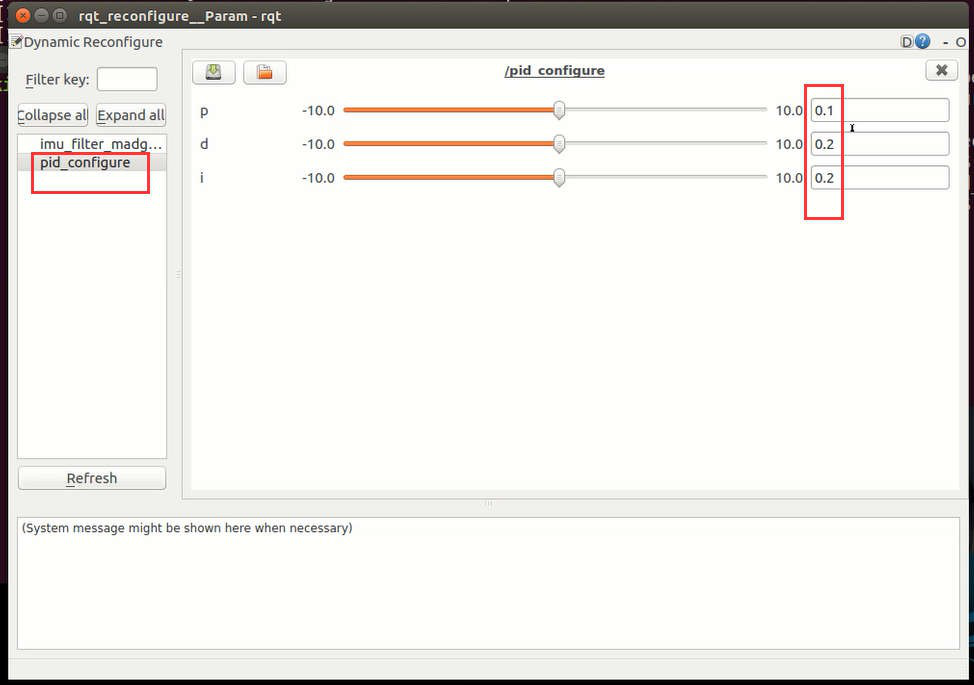
4.在弹出以下窗口,点击左边的 pid_configure,然后我们看到右边有三个数值是0.1,0.2,0.2,分别对应 p,i,d 三个参数的值,这三个值是我们小车配套使用的电机,已经调试好的 pid 值。如果更换过电机后,就要适配该电机比较合适的电机 p,i,d 参数,才能达到比较好的控制电机的效果,调试好的值写在底层驱动板固件里面,上层就是通过此方法快速调试到电机合适的pid 参数。
方法:以 0.1 为单位去增加或者减少 pid 三个参数的值,调整参数,然后虚拟机端启动键盘控制小车,一步步调试,直到找到合适的 pid 参数,参考指标是能让电机缓起缓停,转动平顺等。