该系列为DR_CAN动态系统的建模与分析系列视频笔记,详见https://space.bilibili.com/230105574
由于笔者水平有限,文中难免存在一些不足和错误之处,诚请各位批评指正。
1 传递函数
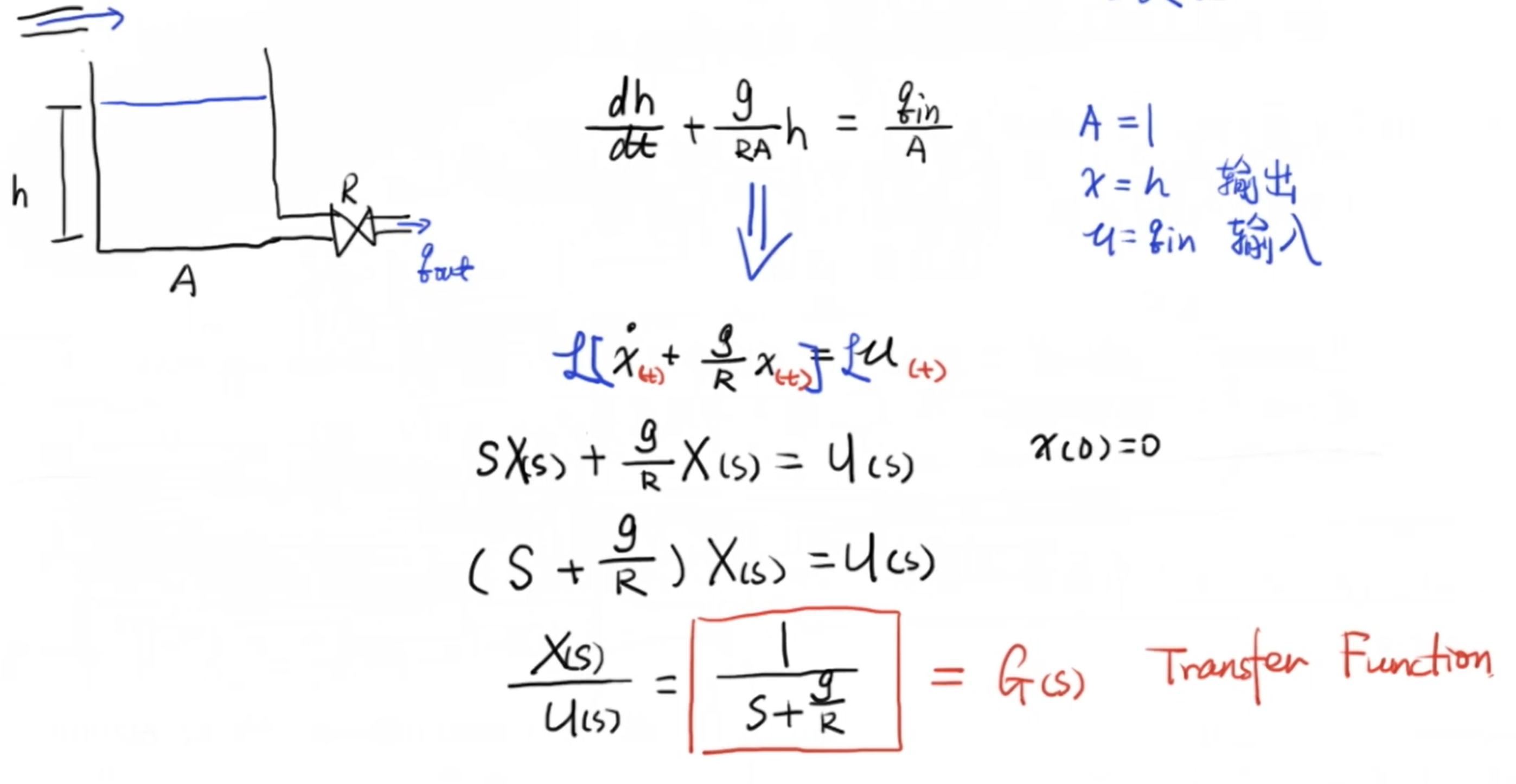
一个流体模型的例子,以水的流入作为输入,以水箱的高度作为输出,通过对该模型的微分方程进行拉普拉斯变换,我们可以得到 ((s+g/R)X(s)=U(s)) 这样的方程,经过移项我们可以得到系统输出与输入的比值,而这个比值的表达式就是这个系统的传递函数
2 极点
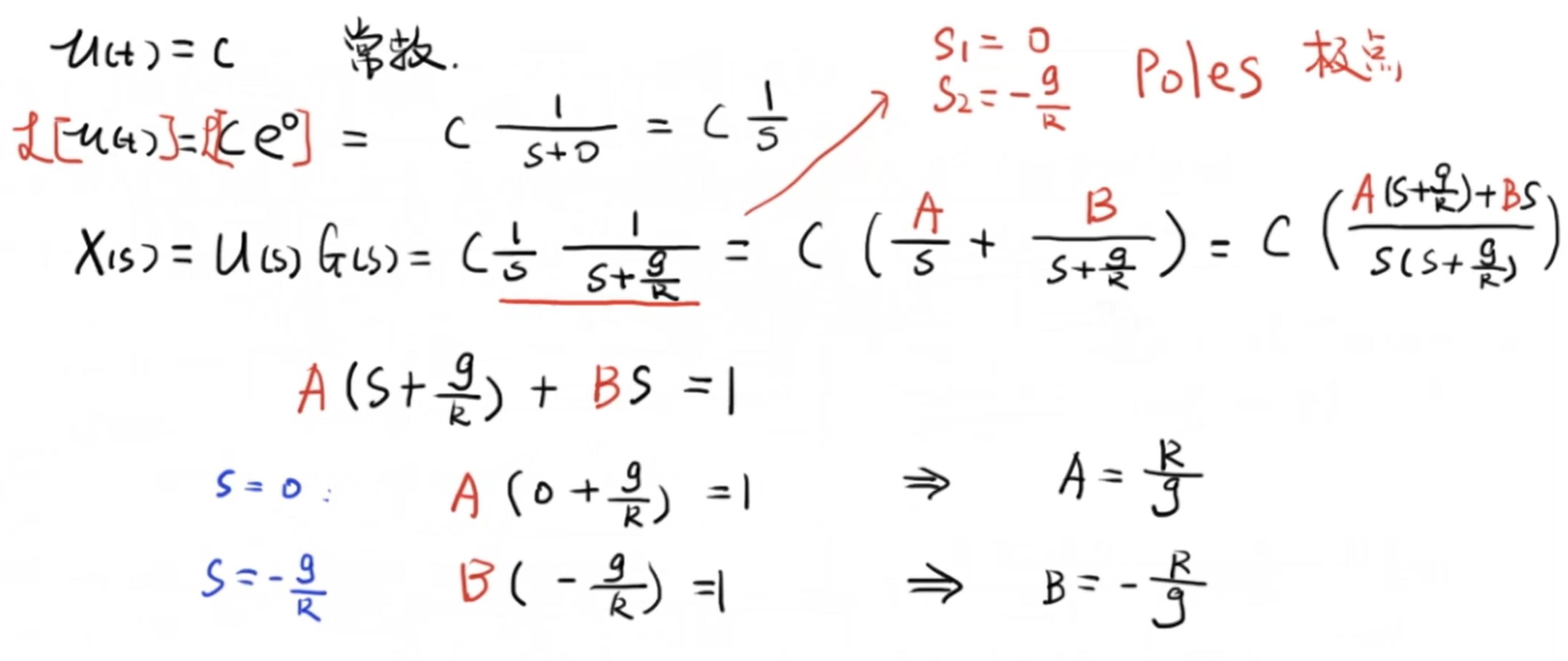
我们现在给这个系统一个恒定的输入,也就是一个常数 (c)。对这个输入做拉普拉斯变换可以得到其在 (s) 域下的表现形式:(U(s) = c/S)。通过将系统输入与传递函数相乘,我们可以求出系统在当前输入下的输出表现。
然后我们对其进行拉普拉斯逆变换,就可以得到系统输出的时域函数。通过分析这个时域函数和它的图像,我们可以看到在恒定输入下这个系统是稳定的,系统输出最终会收敛到 (cR/g) :
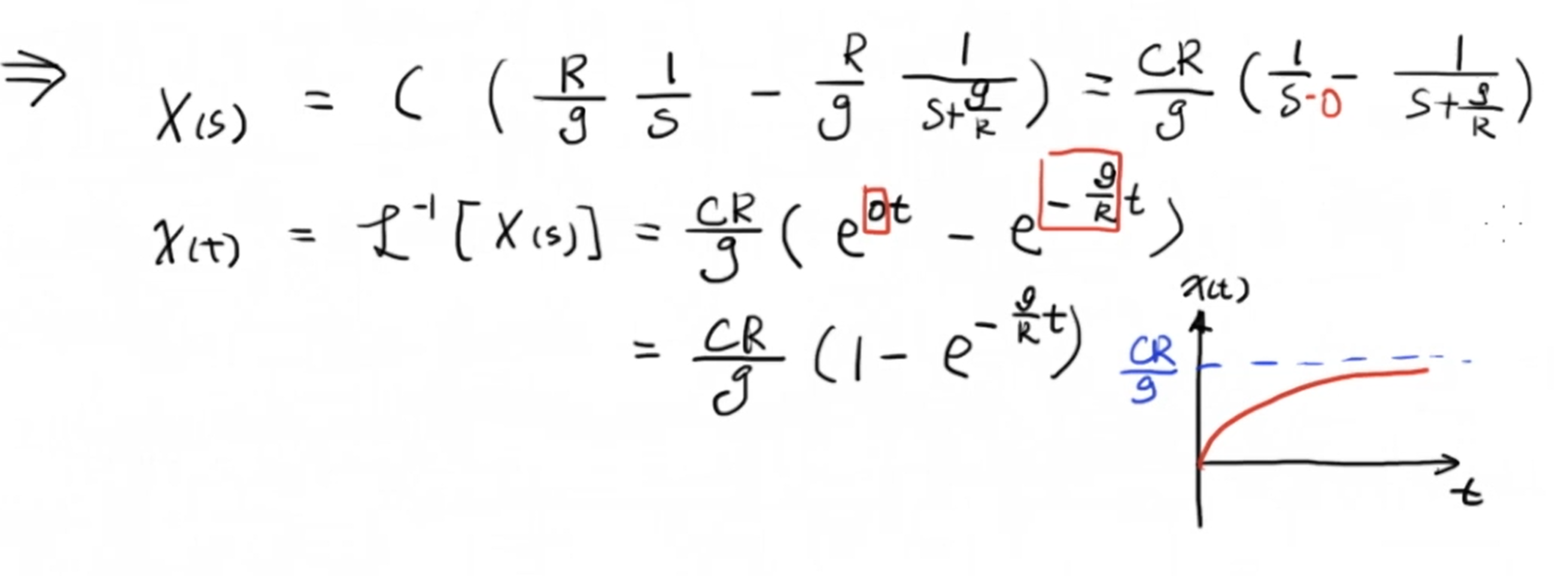
这是一个典型的一阶系统的响应,而这个系统的关键点,就在指数部分。可以看到这有 (0t) 和 (-g/Rt) 两个指数。其中 0 意味着这个系统不会变,是稳定的,而 (-g/R) 意味着它会随着时间不断衰减。所以说这个系统是稳定的,不会随着时间增长到无穷。
这两个系数不仅出现在了系统输出的时域函数中,同样也出现在了其 (s) 域表达式中。这两个值,便是使传递函数分母为 0 的值,这就是所谓的极点。
3 总结
经过上面的例子,我们就可以理解经典控制理论的一个基本理念了。就是通过设计不同的系统输入,来配置这个系统的极点,让这个极点达到一个我们期望的值,从而达到控制系统输出的目的。