注:以下内容来源于https://wenku.baidu.com/view/a44869e1f424ccbff121dd36a32d7375a417c6c9.html,感谢分享!
一、坐标系
1、平面直角坐标系中的伸缩变换
设点P(x,y)是平面直角坐标系xOy中的任意一点,在变换

的作用下,点P(x,y)对应到点 ,我们把
,我们把 称为平面直角坐标系xOy中的坐标伸缩变换,简称伸缩变换。
称为平面直角坐标系xOy中的坐标伸缩变换,简称伸缩变换。
2、极坐标系
(1)极坐标系的概念
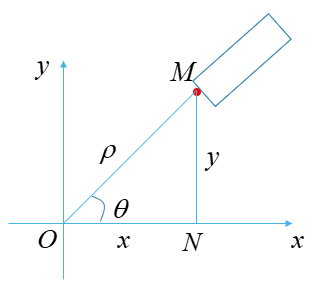
如图所示,在平面内取一个定点O,叫做极点;自极点O引一条射线Ox,叫做极轴;再选定一个长度单位,一个角度单位(通常取弧度)及其正方向(通常取逆时针方向),这样我们就建立了一个极坐标系。

(2)极坐标
设点M是平面内一点,极点O与点M的距离叫做点M的极径,记为 ;以极轴Ox为始边,射线OM为终边的
;以极轴Ox为始边,射线OM为终边的 叫做点M的极角,记为
叫做点M的极角,记为 。我们把有序对
。我们把有序对 叫做点M的极坐标,记为
叫做点M的极坐标,记为 。
。
(3)极径、极角的取值范围
一般地,极径 ,极角
,极角 。
。
3、极坐标与直角坐标之间的互化
如图所示,设点M是平面内任意一点,记点M的直角坐标为(x,y),极坐标为  。我们可以得到极坐标与直角坐标之间如下关系:
。我们可以得到极坐标与直角坐标之间如下关系:
(i)直角坐标化极坐标:

(ii)极坐标化直角坐标

【注】上面两类关系式是我们进行极坐标与直角坐标互化的重要关系式。解题时,大家要根据题意灵活选用。
4、几个简单曲线的极坐标方程
(1)圆的极坐标方程:圆心在 ,半径为a的圆的极坐标方程为
,半径为a的圆的极坐标方程为 ;
;
(2)直线的极坐标方程:经过极点,从极轴到直线的角是 的直线l的极坐标方程为
的直线l的极坐标方程为 和
和 。
。
5、柱坐标系与球坐标系
(1)柱坐标系
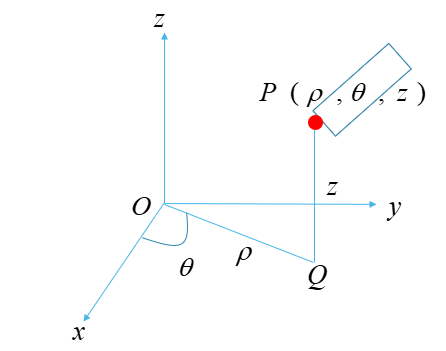
如图所示,建立空间直角坐标系Oxyz,设点P是空间中任意一点,它在Oxy平面上的射影点为Q,用  表示点Q在Oxy平面上的极坐标,这时点P的位置可用有序数组
表示点Q在Oxy平面上的极坐标,这时点P的位置可用有序数组
表示。我们把建立上述对应关系的坐标系叫做柱坐标系;相应地,把有序数组 叫做点P的柱坐标,记作
叫做点P的柱坐标,记作
,其中 ,
, ,
,
。
【注】直角坐标与柱坐标互化的变换公式:
(2)球坐标系
如图所示,建立空间直角坐标系Oxyz,设点P是空间中任意一点,连结OP,记 ,OP与Oz轴正向所夹的角为
,OP与Oz轴正向所夹的角为 ,设点P在Oxy平面上的射影为点Q,Ox轴按逆时针方向旋转到OQ时所转过的正角为
,设点P在Oxy平面上的射影为点Q,Ox轴按逆时针方向旋转到OQ时所转过的正角为 ,这样点P的位置就可以用有序数组
,这样点P的位置就可以用有序数组 表示。我们把建立上述对应关系的坐标系叫做球坐标系(或空间极坐标系);相应地,把有序数组
表示。我们把建立上述对应关系的坐标系叫做球坐标系(或空间极坐标系);相应地,把有序数组 叫做点P的球坐标,记作
叫做点P的球坐标,记作 ,其中
,其中
,
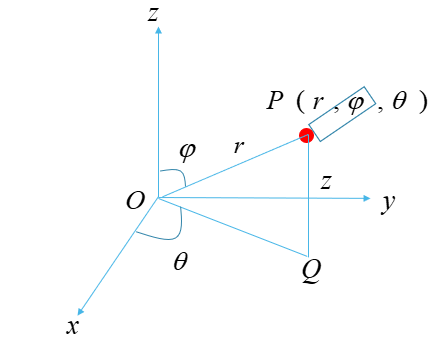
【注】直角坐标与球坐标互化的变换公式:

二、参数方程
1、参数方程的概念
一般地,在平面直角坐标系中,如果曲线上任意一点的坐标x,y都是某个变数t的函数
 ,并且对于t的每一个允许值,由方程组
,并且对于t的每一个允许值,由方程组 所确定的点P(x,y)都在这条曲线上,那么我们就把方程组
所确定的点P(x,y)都在这条曲线上,那么我们就把方程组
叫做这条曲线的参数方程,而把联系变数x,y的变数t叫做参变数,简称参数。
2、参数方程与普通方程之间的互化
曲线的参数方程与普通方程是曲线方程的两种不同形式。一般地,可以通过消去参数,由参数方程得到普通方程;反之,如果已知变数x,y中的一个与参数t的关系,例如 ,则我们可以通过把它带入普通方程,求出另一个变数与参数的关系
,则我们可以通过把它带入普通方程,求出另一个变数与参数的关系 ,由此得到的方程组
,由此得到的方程组 就是该曲线的参数方程。
就是该曲线的参数方程。
【注】在解决参数方程与普通方程互化的问题时,必须要使x,y的取值范围保持一致。
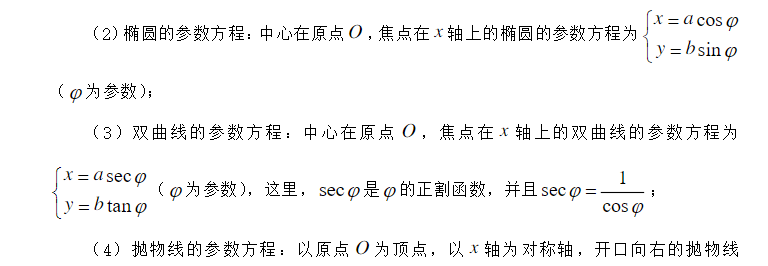
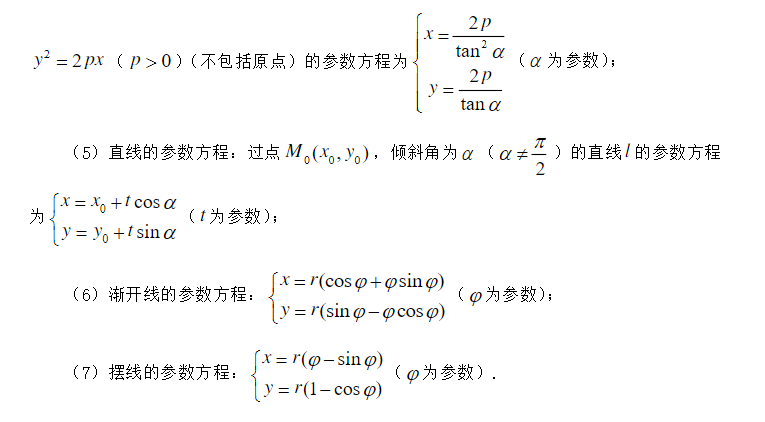
3、几个简单曲线的参数方程
(1)圆的参数方程:圆心在原点O,半径为r的圆的参数方程为 ,(
,( 为参数);
为参数);