以下面的计算力图说明

节点相关常用命令
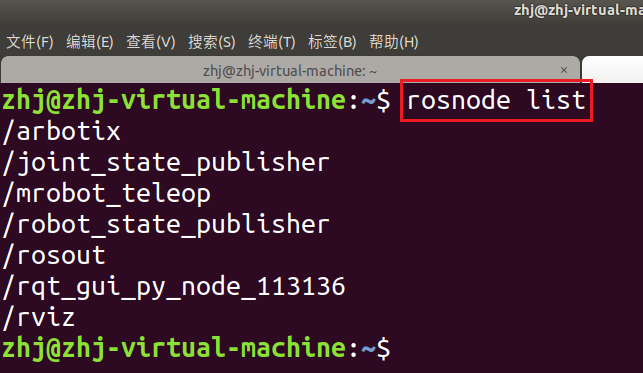
在终端中查看项目中有哪些节点
命令:rosnode list
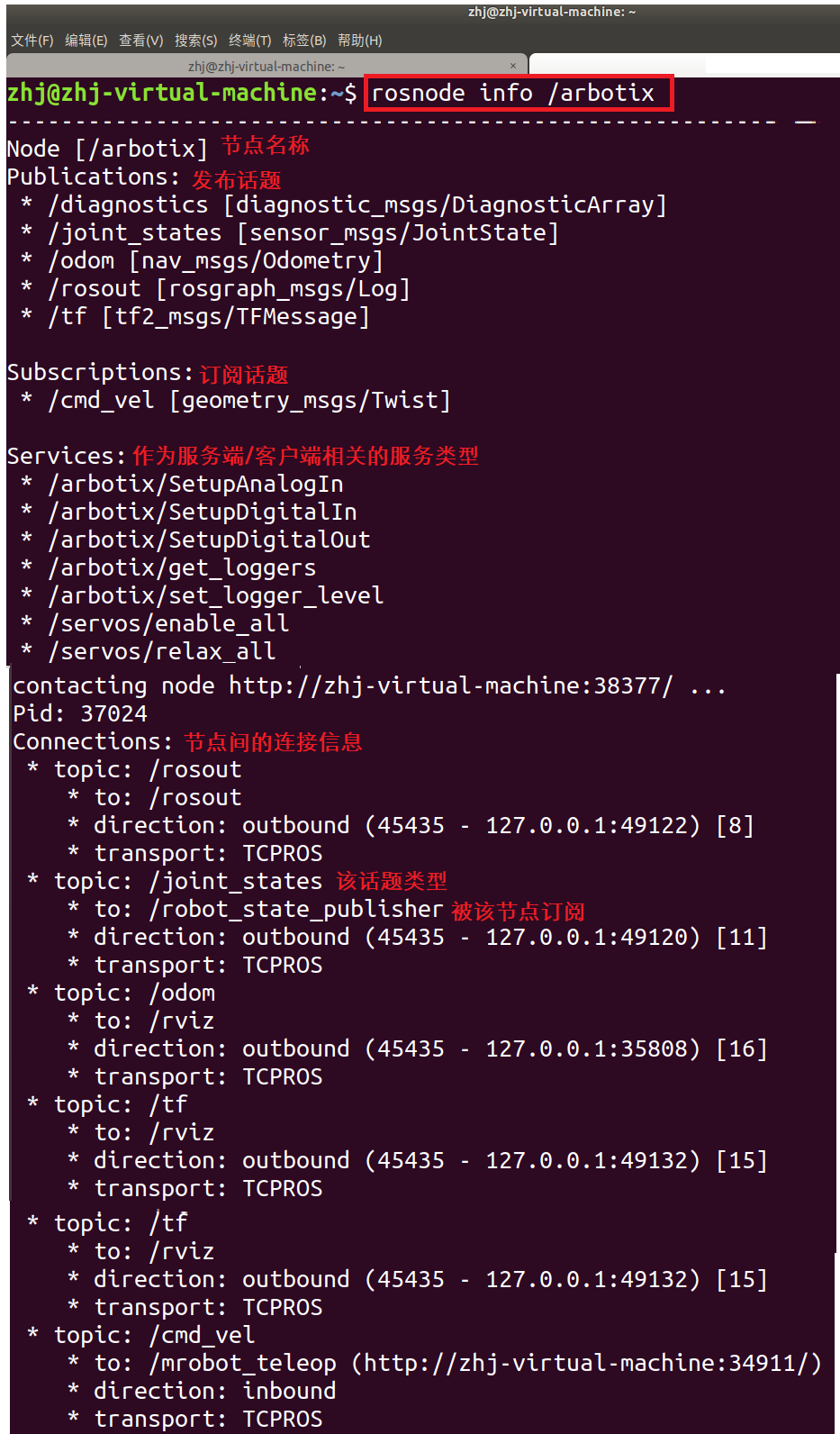
有了节点信息想要查看节点中到底发布订阅了哪些话题,作为服务端服务类型或者作为客户端需要的服务类型
以上面的第一个节点为例
命令:rosnode info + 节点名
话题相关常用命令
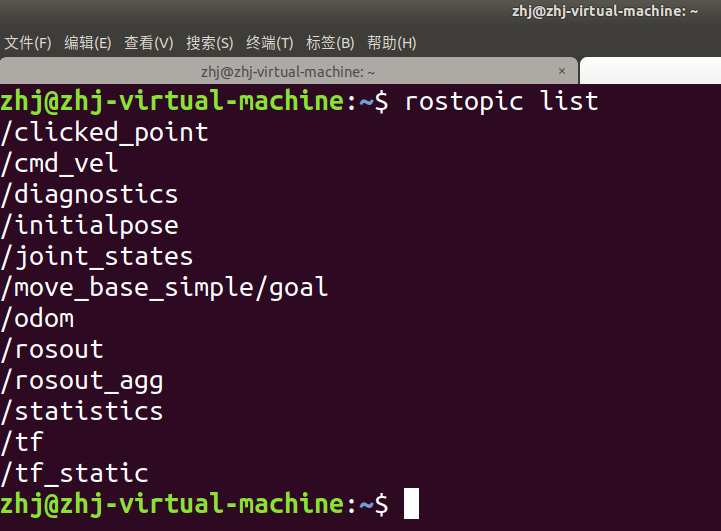
在终端中查看项目中有哪些话题
命令: rostopic list
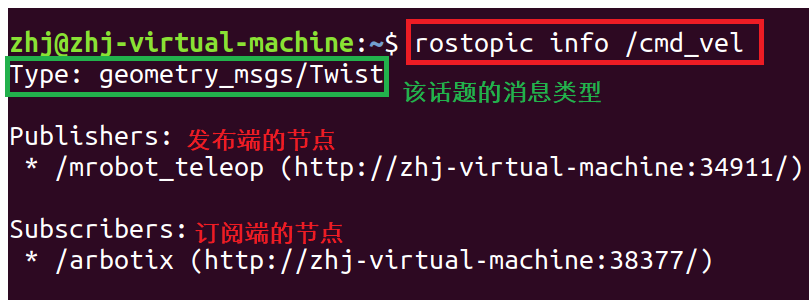
查看话题的订阅端和发布端节点,以及话题的消息类型
命令 : rostopic info + 话题名称
也可以单独查看消息类型![]()
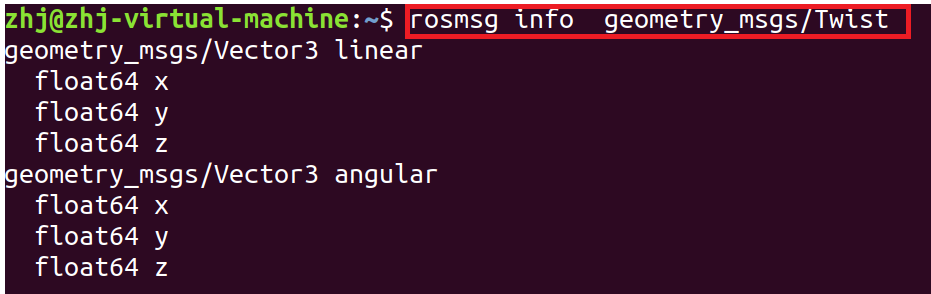
根据上面命令得到了话题的消息类型,可以根据rosmsg命令查看该消息类型的具体信息
服务通信常用命令
在终端中查看项目中有哪些服务
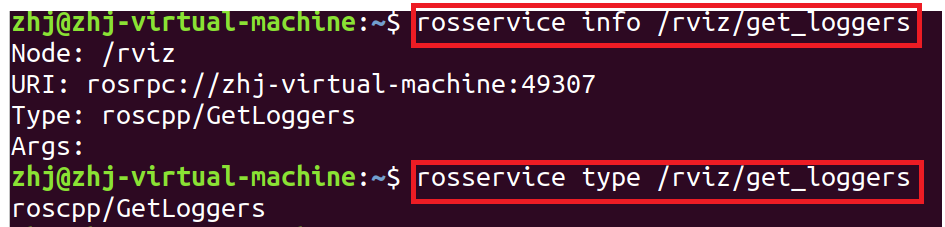
查看service的信息或者服务消息类型
args表示服务消息类型的构成
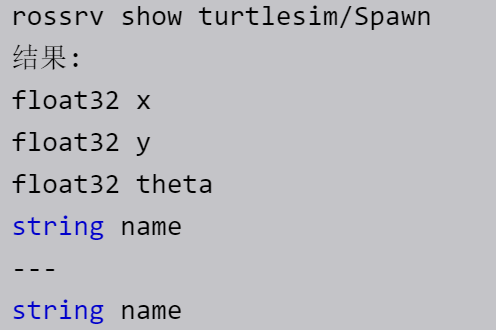
打印服务消息类型的构成 rosservice args + 服务消息类型 下面/spawm 是一种服务消息类型

rossrv show + 服务消息类型 比上面显示的信息更加详细,能显示出消息构成对应的Type