1. 概述
SPI = Serial Peripheral Interface,是串行外围设备接口,是一种高速,全双工,同步的通信总线。常规只占用四根线,节约了芯片管脚,PCB的布局省空间。现在越来越多的芯片集成了这种通信协议,常见的有EEPROM、FLASH、AD转换器等。
优点:
支持全双工,push-pull的驱动性能相比open-drain信号完整性更好;
支持高速(100MHz以上);
协议支持字长不限于8bits,可根据应用特点灵活选择消息字长;
硬件连接简单;
缺点:
相比IIC多两根线;
没有寻址机制,只能靠片选选择不同设备;
没有从设备接受ACK,主设备对于发送成功与否不得而知;
典型应用只支持单主控;
相比RS232 RS485和CAN总线,SPI传输距离短;
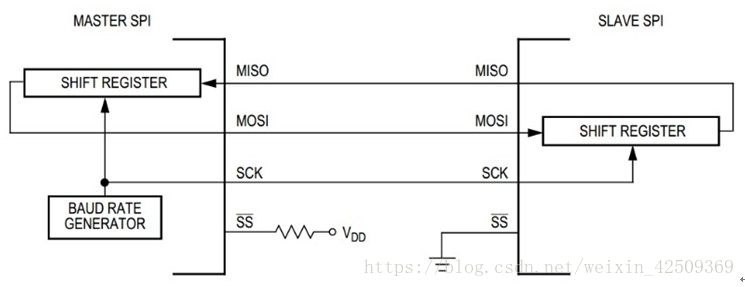
2. 硬件结构
SPI总线定义两个及以上设备间的数据通信,提供时钟的设备为主设备Master,接收时钟的设备为从设备Slave;
信号定义如下:
SCK : Serial Clock 串行时钟
MOSI : Master Output, Slave Input 主发从收信号
MISO : Master Input, Slave Output 主收从发信号
SS/CS : Slave Select 片选信号
电路连接如下:
单个主设备和单个从设备:
单个主设备和多个从设备,通过多个片选信号或者菊花链方式实现:

3. 寄存器类型
Motorola定义的SPI寄存器包括:
SPI Control Register 1 (SPICR1) 控制寄存器1
SPI Control Register 2 (SPICR2) 控制寄存器2
SPI Baud Rate Register (SPIBR) 波特率寄存器
SPI Status Register (SPISR) 状态寄存器 (只读 其余均可读可写)
SPI Data Register (SPIDR) 数据寄存器
通过往寄存器中写入不同的值,设置SPI模块的不同属性。
4. SPI传输模式
通过设置控制寄存器SPICR1中的CPOL和CPHA位,将SPI可以分成四种传输模式。
CPOL,即Clock Polarity,决定时钟空闲时的电平为高或低。对于SPI数据传输格式没有显著影响。
1 = 时钟低电平时有效,空闲时为高
0 = 时钟高电平时有效,空闲时为低
CPHA,即Clock Phase,定义SPI数据传输的两种基本模式。
1 = 数据采样发生在时钟(SCK)偶数(2,4,6,...,16)边沿(包括上下边沿)
0 = 数据采样发生在时钟(SCK)奇数(1,3,5,...,15)边沿(包括上下边沿)
四种模式如下图所示:
先看第一列两张图(CPHA = 0),采样发生在第一个时钟跳变沿,即数据采样发生在SCK奇数边沿;再看第二列(CPHA =1),采样发生在第二个时钟跳变沿,即数据采样发生在SCK偶数边沿。
第一行两张图,第二行两张图(CPOL = 1),SCK空闲状态为高电平。

主从设备进行SPI通讯时,要确保它们的传输模式设置相同。
其中mode0和mode3最为常见,SPI接口的flash中均会有标注。
5. 读写操作
标准SPI读写为例
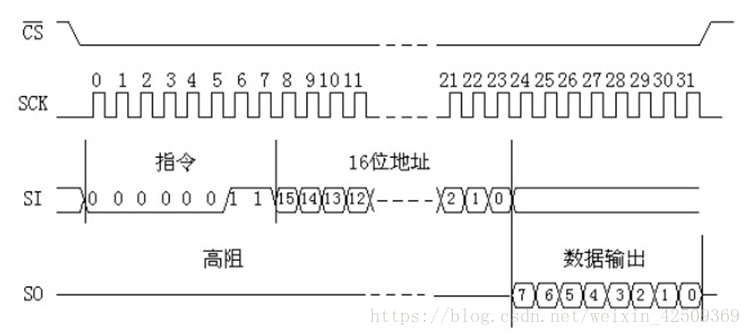
片选---读指令---地址---数据读出
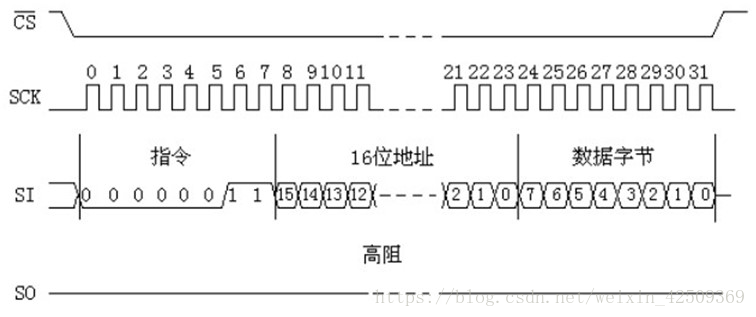
片选---写指令---地址---数据写入
Dual I/O Fast Read Sequence Diagram 双路IO
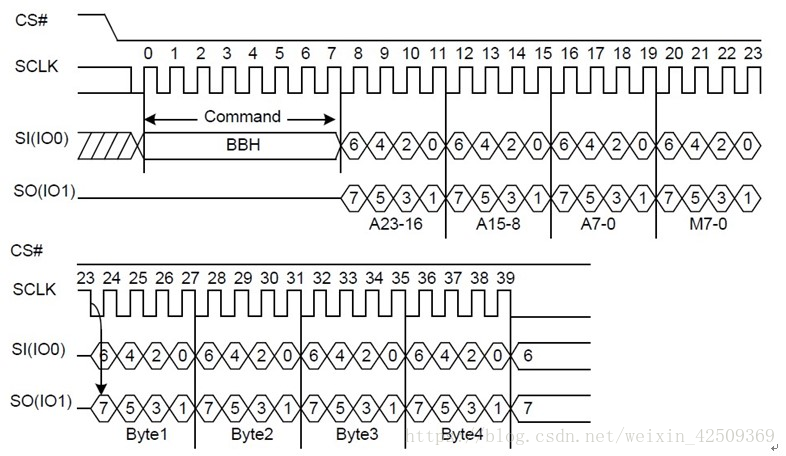
Quad I/O Fast Read Sequence Diagram 四路IO

与IIC一样,是一种最常见的板内芯片间的串行接口。
————————————————
版权声明:本文为CSDN博主「千里沽山」的原创文章,遵循 CC 4.0 BY-SA 版权协议,转载请附上原文出处链接及本声明。
原文链接:https://blog.csdn.net/weixin_42509369/article/details/83096349