一、中断基础概念
内核与外设之间的主要交互方式有两种:轮询和中断。中断系统使得内核具备了应对突发事件的能力。
在执行CPU当前程序时,由于系统中出现了某种急需处理的情况,CPU暂停正在执行的程序,转而去执行另外一段特殊程序来处理出现的紧急事务,处理结束后,CPU自动返回到原来暂停的程序中去继续执行。 这种程序在执行过程中由于外界的原因而被中间打断的情况,称为中断。
采用中断技术后,可以为计算机系统带来以下好处:
1)实现分时操作
速度较快的CPU和速度较慢的外设可以各做各的事情,外设可以在完成工作后再与CPU进行交互,而不需要CPU去等待外设完成工作,能够有效提高CPU的工作效率。
2)实现实时处理
在控制过程中,CPU能够根据当时情况及时做出反应,实现实时控制的要求。
3)实现异常处理
系统在运行过程中往往会出现一些异常情况,中断系统能够保证CPU及时知道出现的异常,以便CPU去解决这些异常,避免整个系统出现大的问题。
两个重要的概念:
<1> 中断服务函数: 内核响应中断后执行的相应处理程序。例如ADC转换完成中断被响应后,CPU执行相应的中断服务函数,该函数实现的功能一般是从ADC结果寄存器中取走并使用转换好的数据。
<2> 中断向量:中断服务程序的入口地址,当CPU响应中断请求时,会跳转到该地址去执行代码。
二、 CC2530中断
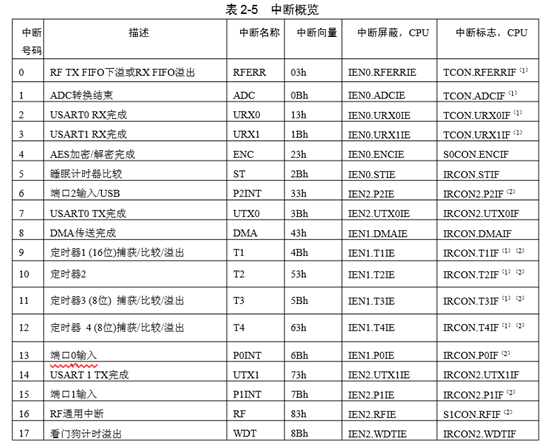
CC2530具有18个中断源,每个中断源都有它自己的位于一系列SFR 寄存器中的中断请求标志。相应标志位请 求的每个中断可以分别使能或禁用。
Tip:
(1)当调用中断服务例程时清除硬件。
(2)另外的 IRQ 掩码和 IRQ 标志位存在。
三、CC2530中断处理函数格式书写
中断服务函数与一般自定义函数不同,有特定的书写格式:
#pragma vector = 中断向量
__interrupt void 函数名称 (void)
{
/*此处编写中断处理函数的具体程序*/
PxIFG = 0; //先清除Px引脚的中断状态标志位
PxIF = 0; //再清除Px端口组的中断状态标志位
}
<1> 在每一个中断服务函数之前,都要加上一句起始语句:
#pragma vector = <中断向量>
<中断向量>表示接下来要写的中断服务函数是为那个中断源服务的,该 语句有两种写法:
#pragma vector = 0x7B或者#pragma vector = P1INT_VECTOR
前者是中断向量的入口地址,后者是头文件“ioCC2530.h”中的宏定义。
<2> _ _interrupt关键字表示该函数是一个中断服务函数,<函数名称>可以 自定义,函数体不能带有参数,也不能有返回值。
四、外部中断
(1)CC2530的P0、P1和P2端口中的每个引脚都具有外部中断输入功能,要使某些引脚具有外部中断功能,需要对IENx寄存器、PxIEN寄存器和PICTL寄存器进行适当的设置。 除了各个中断源都有自己的中断使能开关之外,中断系统还有一个总开关,可以同“EA = 1;”来打开总中断。
IENx寄存器 使能端口组的中断功能。
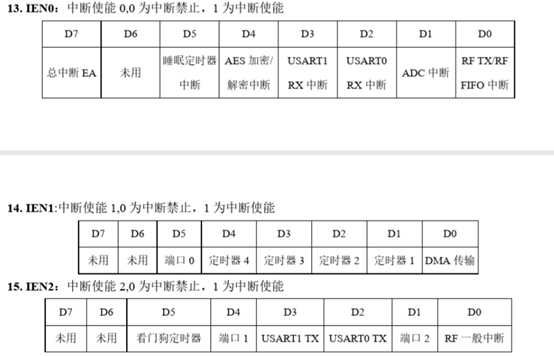
PxIEN寄存器 使能具体的外部中断引脚。


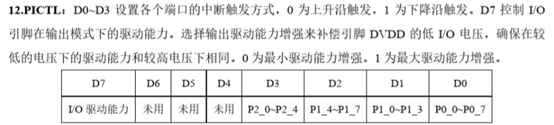
PICTL寄存器 设置中断触发方式。
(2)P0、P1和P2端口分别使用P0IF、P1IF和P2IF作为中断标志位,任何一个端口组上的引脚产生外部中断时,都会将对应端口组的中断标志自动置位。注意,外部中断标志必须在中断服务函数中手工清除,否则CPU会反复进入中断。 端口状态标志寄存器P0IFG、P1IGF和P2IFG,分别对应3个端口中各引脚的中断触发状态,当某引脚发生外部中断触发时,对应的标志位会自动置位,这个标志同样需要手工清除。


题目:
将Zigbee小模块上SW1按键设置为外部中断输入引脚。在中断服务函数中,控制一个LED6灯的开关切换,也就是原来LED是点亮的熄灭,原来熄灭的点亮。同时在主程序中,运行一段跑马灯程序,使LED3和LED4轮流点亮和熄灭。
思路:
(1)端口初始化和跑马灯程序
(2)定义一个外部中断初始化函数,将SW1引脚,即P1_ _2引脚配置成外部中断输入端口,将其中断触发方式设置为下降沿触发。
(3)为外部中断定义-一个中断服务函数,要照中断服务函数的书写格式编程,注意要在中断服务函数中把相应的中断标志位清除。必须先清除引脚的中断标志,再清除端口组的中断标志。
解题:
【1】设计外部中断初始化函数Init_INTP()
外部中断初始化函数,主要是完成跟中断相关的特殊功能寄存器配置工作:
<1> 配置IENx寄存器,使能端口组的中断功能。
<2> 配置PxIEN寄存器,使能具体的外部中断引脚。
<3> 配置PICTL寄存器,设置中断触发方式。
1 void Init_INTP() 2 { 3 IEN2 |= 0x10; //端口1中断使能 0001 0000 端口1 中断使能 4 P1IEN |= 0x04; //端口P1_2外部中断使能 0000 0100 P1_2 使能具体的外部中断引脚。 5 PICTL |= 0x02; //端口P1_0到P1_3下降沿触发 0000 0010 P1_0和P1_1 下降沿触发 6 EA = 1; //使能总中断 7 }
【2】设计外部中断服务函数Int1_Sevice()
在编写中断服务函数的时候,书写格式要正确,中断向量不能搞错。特别要注意:在函数里面把端口组和引脚的标志位清除,否则CPU将会反复进入中断,必须先清除引脚标志位PxIFG,再清除端口组标志位PxIF。
#pragma vector = P1INT_VECTOR //外部中断1的向量入口 __interrupt void Int1_Sevice() { LED6 = ~LED6; /*先清除引脚标志位,再清除端口标志位,否则会不断进入中断*/ P1IFG &= ~ 0x04; //软件清除P1_2引脚的标志位 P1IF = 0; //软件清除P1端口组的标志位 }
最终代码:


1 #include "ioCC2530.h" 2 3 #define LED6 P1_4 4 #define LED3 P1_0 5 #define LED4 P1_1 6 /*===================延时函数=========================*/ 7 void Delay(unsigned int t) 8 { 9 while(t--); 10 } 11 /*==================端口初始化函数=====================*/ 12 void Init_Port() 13 { 14 //将P1_0、P1_1和P1_4设置为通用I/O端口功能 15 P1SEL &= ~0x13; 16 //将P1_0、P1_1和P1_4的端口传输方式设置为输出 17 P1DIR |= 0x13; 18 19 P1SEL &= ~0x04; //P1_2作为通用I/O端口 20 P1DIR &= ~0x04; //P1_2端口输入 21 P1INP &= ~0x04; //P1_2设置为上拉/下拉模式 22 P2INP &= ~0x40; //P1_2设置为上拉 23 24 LED6 = 0; 25 LED3 = 0; 26 LED4 = 0; 27 } 28 /*==================跑马灯子函数=====================*/ 29 void LED_Running() 30 { 31 LED3 = 1; 32 Delay(50000); 33 LED4 = 1; 34 Delay(50000); 35 LED3 = 0; 36 Delay(50000); 37 LED4 = 0; 38 Delay(50000); 39 } 40 /*===============外部中断初始化函数==================*/ 41 void Init_INTP() 42 { 43 IEN2 |= 0x10; //端口1中断使能 0001 0000 端口1 中断使能 44 P1IEN |= 0x04; //端口P1_2外部中断使能 0000 0100 P1_2 使能具体的外部中断引脚。 45 PICTL |= 0x02; //端口P1_0到P1_3下降沿触发 0000 0011 P1_0和P1_1 下降沿触发 46 EA = 1; //使能总中断 47 } 48 /*================外部中断1服务函数====================*/ 49 #pragma vector = P1INT_VECTOR //外部中断1的向量入口 50 __interrupt void Int1_Sevice() 51 { 52 LED6 = ~LED6; 53 /*先清除引脚标志位,再清除端口标志位,否则会不断进入中断*/ 54 P1IFG &= ~ 0x04; //软件清除P1_2引脚的标志位 55 P1IF = 0; //软件清除P1端口组的标志位 56 } 57 /*====================主函数==========================*/ 58 void main() 59 { 60 Init_Port(); //初始化通用I/O端口 61 Init_INTP(); //初始化外部中断 62 while(1) 63 { 64 LED_Running(); //跑马灯 65 } 66 }
总结
void Init_INTP() //中断初始化函数
{
EA = 1; //开总中断
IENx = ? ; //要用哪一个端口组?P0,P1还是P2?
/*
IEN1 |= 0x20;开P0端口组中断
IEN2 |= 0x10;开P1端口组中断
IEN2 |= 0x01;开P2端口组中断
以上都为固定开各个端口组中断的写法,至于为什么是这样子才能开P0,P1,或P2端口组的中断,翻看手册就知道了
*/
PxIEN = ? ; //开端口组中断之后,要选择用哪一个引脚?
PICTL = ? ; //开引脚中断之后,选择沿触发方式,上升沿还是下降沿?
}
#pragma vector = 中断向量
__interrupt void 函数名称 (void)
{
/*此处编写中断处理函数的具体程序*/
PxIFG = 0; //先清除Px引脚的中断状态标志位
PxIF = 0; //再清除Px端口组的中断状态标志位
}