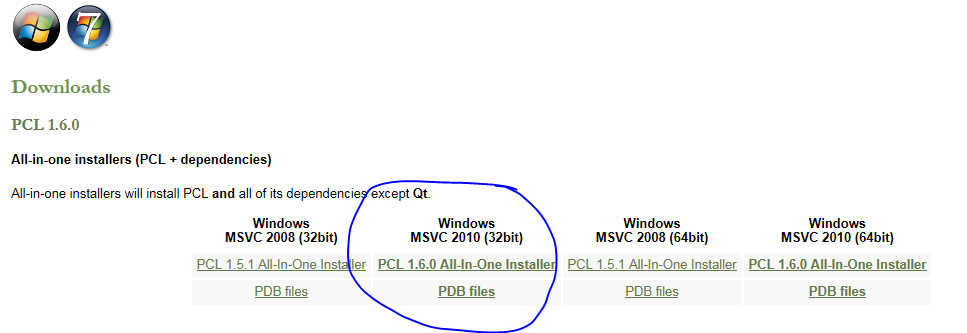
1.安装文件下载:官网,我还是比较喜欢别人编译好的安装包啊,哈哈。
http://www.pointclouds.org/downloads/windows.html
2.傻瓜式安装(下面的依赖项都集成进来了)
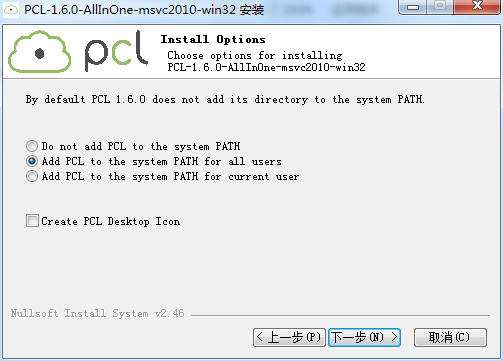 写入环境变量,这个很不错,可选。
写入环境变量,这个很不错,可选。
中间安装了Boost、VTK、Kinect驱动什么的。反正是一路下一步,当然我的机器是Win7系统,之前没有安装过PCL,比较纯净。
之后又单独安装了QT4.8.2的sdk。
3.测试
在安装目录下有share/doc/pcl-1.6/tutorials/sources/pcd_write事例程序,用CMake3.3.2生成VS2010项目文件。
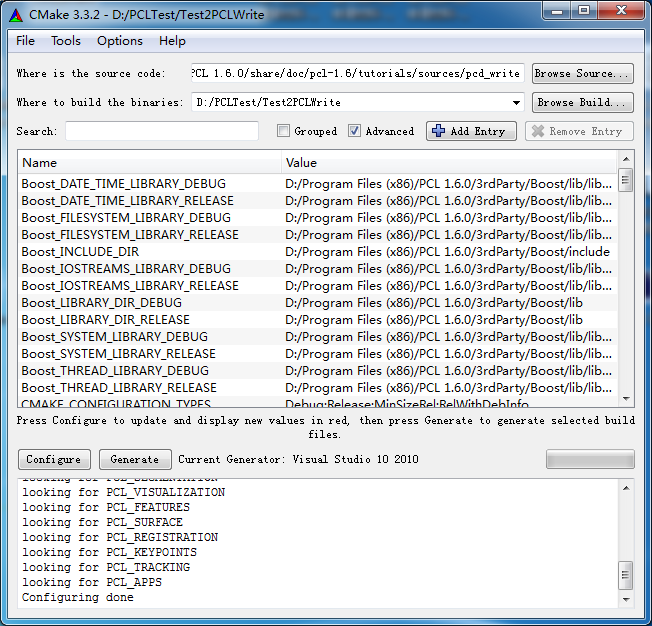
编译运行生成了一个.pcd格式文件。
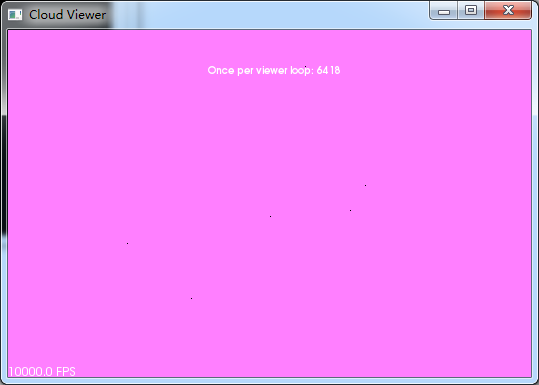
同样编译下面的程序:D:Program Files (x86)PCL 1.6.0sharedocpcl-1.6 utorialssourcescloud_viewer
这个项目引用了QT4.8.2的sdk的类库。查看刚才生成的.pcd文件,结果如图,大概有几个小点点:
pcd格式文件的基本内容如下:


1 # .PCD v0.7 - Point Cloud Data file format 2 VERSION 0.7 3 FIELDS x y z 4 SIZE 4 4 4 5 TYPE F F F 6 COUNT 1 1 1 7 WIDTH 5 8 HEIGHT 1 9 VIEWPOINT 0 0 0 1 0 0 0 10 POINTS 5 11 DATA ascii 12 1.28125 577.09375 197.9375 13 828.125 599.03125 491.375 14 358.6875 917.4375 842.5625 15 764.5 178.28125 879.53125 16 727.53125 525.84375 311.28125
附加依赖项:debug
1 D:Program FilesPCLlibpcl_segmentation_debug.lib 2 D:Program FilesPCLlibpcl_visualization_debug.lib 3 D:Program FilesPCLlibpcl_features_debug.lib 4 D:Program FilesPCLlibpcl_filters_debug.lib 5 D:Program FilesPCLlibpcl_search_debug.lib 6 D:Program FilesPCLlibpcl_octree_debug.lib 7 D:Program FilesPCLlibpcl_sample_consensus_debug.lib 8 D:Program FilesPCLlibpcl_ml_debug.lib 9 D:Program FilesPCLlibpcl_kdtree_debug.lib 10 D:Program FilesPCLlibpcl_io_debug.lib 11 D:Program FilesPCLlibpcl_common_debug.lib 12 D:Program FilesPCLlibpcl_io_ply_debug.lib 13 D:Program FilesPCLlibpcl_surface_debug.lib 14 D:Program FilesPCL 1.6.03rdPartyBoostliblibboost_system-vc100-mt-gd-1_49.lib 15 D:Program FilesPCL 1.6.03rdPartyBoostliblibboost_filesystem-vc100-mt-gd-1_49.lib 16 D:Program FilesPCL 1.6.03rdPartyBoostliblibboost_thread-vc100-mt-gd-1_49.lib 17 D:Program FilesPCL 1.6.03rdPartyBoostliblibboost_date_time-vc100-mt-gd-1_49.lib 18 D:Program FilesPCL 1.6.03rdPartyBoostliblibboost_iostreams-vc100-mt-gd-1_49.lib
release
1 D:Program FilesPCL 1.6.03rdPartyBoostliblibboost_system-vc100-mt-1_49.lib 2 D:Program FilesPCL 1.6.03rdPartyBoostliblibboost_filesystem-vc100-mt-1_49.lib 3 D:Program FilesPCL 1.6.03rdPartyBoostliblibboost_thread-vc100-mt-1_49.lib 4 D:Program FilesPCL 1.6.03rdPartyBoostliblibboost_date_time-vc100-mt-1_49.lib 5 D:Program FilesPCL 1.6.03rdPartyBoostliblibboost_iostreams-vc100-mt-1_49.lib 6 D:Program FilesPCLlibpcl_io_release.lib 7 D:Program FilesPCLlibpcl_segmentation_release.lib 8 D:Program FilesPCLlibpcl_io_ply_release.lib 9 D:Program FilesPCLlibpcl_ml_release.lib 10 D:Program FilesPCLlibpcl_features_release.lib 11 D:Program FilesPCLlibpcl_filters_release.lib 12 D:Program FilesPCLlibpcl_search_release.lib 13 D:Program FilesPCLlibpcl_sample_consensus_release.lib 14 D:Program FilesPCLlibpcl_octree_release.lib 15 D:Program FilesPCLlibpcl_kdtree_release.lib 16 D:Program FilesPCLlibpcl_common_release.lib 17 D:Program FilesPCLlibpcl_surface_release.lib
学习目标:点云的匹配。