旋转矩阵是姿态的一种数学表达方式,或者笼统说变换矩阵是一种抽象的数学变量。其抽象在于当你看到数据,根本无法断定其正确性;往往只有转换为较为直观的欧拉角,然后大概目测估算(总不能拿着量角器去测量精度吧)。
我们知道,姿态的数学形式有旋转矩阵(满足RTR=E)、欧拉角、旋转向量(角轴)、四元数(norm(x y z w) = 1)等。今天这里要讨论的是旋转矩阵相关理论基础。
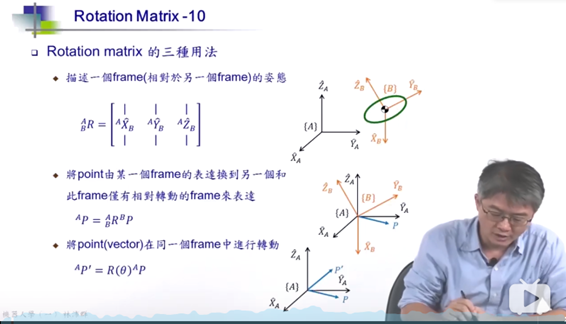
旋转矩阵常用于以下三种场景:
- 描述一个frame(坐标系)相对于另一个frame间的位姿;(如:描述相邻两帧间的相机运动)
- 描述一个point从一个frame变换到另一个frame;(其实点没动,只是在两个frame观测时,坐标不一样而已;如:;路标点点P在不同相机坐标系下坐标值不同,但在世界坐标系下是固定的)
- 描述一个point在同一个frame中的运动;(这里的点是运动了的,在VSLAM中应用较少)
绕三个轴的旋转矩阵请按以下形式进行记忆,可能有些地方是下面的转置形式。
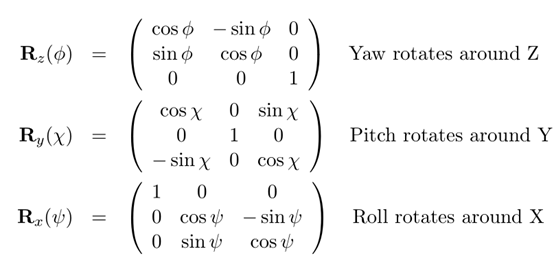
(本博客和大多数论文资料一样,都是左乘原则)
一、固定旋转(Fix Angles)
所谓固定旋转,就是按照物体外部固定轴旋转。这种旋转在工程中很常见,用的相对多一些(相对于下面的欧拉旋转),例如:旋转次序为X-Y-Z,那么旋转矩阵的形式为:RZRYRX。如下图,其实没什么好说。

已知旋转矩阵,怎么求解欧拉角呢?下图便是一种比较好的求解办法。我们知道,顺时针旋转180°和逆时针旋转180°是等效的(让机械臂旋转190°其实是走远路,因为旋转170°似乎更快),所以求解出来的欧拉角其取值范围最好是:[0°,180°] or [0°,-180°] 或者[-90°,90°],这里采用的后者。
下图中的atan2是matlab中的api,我们在这里简单验证下其与tan的区别:可以看到,当一个点在第三象限,如(-1, -1),在欧拉角中,其角度为:-135°,但是atan(-1/-1)算出来是45°,显然是错的。
1 >> atan(1) * 180 / pi 2 3 ans = 4 5 45 6 7 >> atan2(1, 1) * 180 / pi 8 9 ans = 10 11 45 12 13 >> atan2(-1, -1) * 180 / pi 14 15 ans = 16 17 -135 18 19 >>
顺在在这里用Eigen验证下:(相关头文件去这个链接中查找: https://www.cnblogs.com/winslam/p/12765822.html )不去下载,下面C++代码你都跑不了


1 #include"geometry.h" 2 #include<iostream> 3 using namespace std; 4 5 int main() 6 { 7 Eigen::Matrix3d R1; 8 R1 << 0.866, 0.433, 0.25, 0., 0.5, -0.866, -0.5, 0.75, 0.433; 9 10 Pose pose1(R1); 11 cout << "旋转矩阵 = " << endl; cout << pose1.rotation() << endl; 12 cout << "欧拉角 = " << endl; cout << pose1.euler_angle().transpose()*(180 / M_PI) << endl; 13 cout << "四元数 = " << endl; cout << pose1.quaternion().coeffs().transpose() << endl; 14 cout << "角轴 = " << endl; 15 cout << pose1.angle_axis().angle()* (180 / M_PI) << " " << pose1.angle_axis().axis().transpose() << endl; 16 cout << "-----------------------------" << endl; 17 return 1; 18 }
打印结果:
1 旋转矩阵 = 0.866 0.433 0.25 2 0 0.5 -0.866 3 -0.5 0.75 0.433 4 欧拉角 = 63.4349 14.4779 -26.5651 5 四元数 = 0.482959 0.224145 -0.129407 0.836511 6 角轴 = 66.4519 0.881411 0.409071 -0.23617
可以看到Eigen的欧拉角结果和上述PPT中Matlab计算的结果不一样,但是他们旋转矩阵具体是一样的,这个是正常的,下面还会碰到。其实就是利用欧式旋转矩阵求解
欧拉角的解并不唯一,这个问题在手眼标定中验证过。


二、欧拉旋转(Euler Angle)
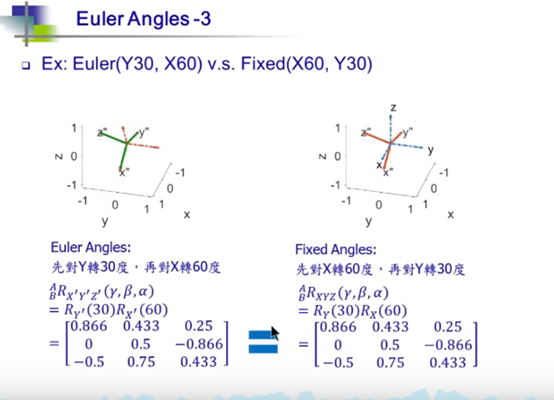
固定旋转与欧拉旋转的关系,例如:固定旋转次序为:XYZ,写成旋转矩阵则为:Rz*Ry*Rx;其等效的欧拉旋转次序为:ZYX,写成旋转矩阵则为:Rz*Ry*Rx,最后的映射矩阵是一样的,但是过程不一样,殊途同归。)例如下面例子:
ZYZ的欧拉旋转次序,这个我是实际“体验过”,那是在自研机械臂上示教器是数据。
欧拉旋转的方式如下图:

形如固定旋转,我这里也给出:已经ZYZ类型欧拉旋转,求解欧拉角的一种方法:

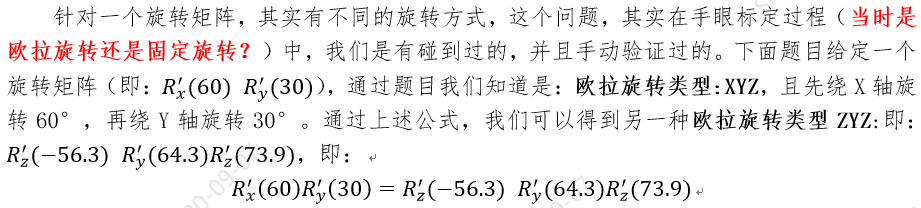
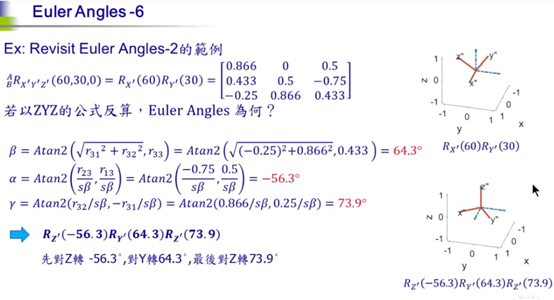
针对上面等式![]() ,这里用Eigen验证下:
,这里用Eigen验证下:
对于等式左边:
1 #include"geometry.h" 2 #include<iostream> 3 using namespace std; 4 5 int main() 6 { 7 // 低级错误:是60.0,不是60 8 Eigen::Matrix3d R1; 9 R1 = Eigen::AngleAxisd(60.0 / 180 * M_PI, Eigen::Vector3d::UnitX()) * 10 Eigen::AngleAxisd(30.0 / 180 * M_PI, Eigen::Vector3d::UnitY()) * 11 Eigen::AngleAxisd( 0.0, Eigen::Vector3d::UnitZ()); 12 13 Pose pose3(R1); 14 cout << "旋转矩阵 = " << endl; cout << pose3.rotation() << endl; 15 cout << "欧拉角 = " << endl; cout << pose3.euler_angle().transpose()*(180 / M_PI) << endl; 16 cout << "四元数 = " << endl; cout << pose3.quaternion().coeffs().transpose() << endl; 17 cout << "角轴 = " << endl; 18 cout << pose3.angle_axis().angle()* (180 / M_PI) << " " << pose3.angle_axis().axis().transpose() << endl; 19 cout << "-----------------------------" << endl; 22 return 1; 23 }

针对等式右边,同理有:
#include"geometry.h" #include<iostream> using namespace std; int main() { Eigen::Vector3d RPY; RPY << -56.3 / 180 * M_PI, 64.3 / 180 * M_PI, 73.9 / 180 * M_PI; cout << RPY(2, 0) << endl; Eigen::Matrix3d R2; // note: ZYZ R2 = Eigen::AngleAxisd(RPY(0, 0), Eigen::Vector3d::UnitZ()) * Eigen::AngleAxisd(RPY(1, 0), Eigen::Vector3d::UnitY()) * Eigen::AngleAxisd(RPY(2, 0), Eigen::Vector3d::UnitZ()); Pose pose4(R2); cout << "旋转矩阵 = " << endl; cout << pose4.rotation() << endl; cout << "欧拉角 = " << endl; cout << pose4.euler_angle().transpose()*(180 / M_PI) << endl; cout << "四元数 = " << endl; cout << pose4.quaternion().coeffs().transpose() << endl; cout << "角轴 = " << endl; cout << pose4.angle_axis().angle()* (180 / M_PI) << " " << pose4.angle_axis().axis().transpose() << endl; cout << "-----------------------------" << endl; return 1; }
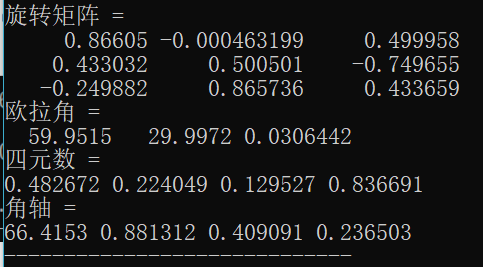
对比两种旋转方式,可以看到Eigen计算的结果完全一致;但是比较有意思的是,对于下面,我用的欧拉角明明是( -56.3, 64.3, 73.9 )(ZYZ),结果打印输出的
欧拉角居然是(59.9, 29.99, 0.031)。这是由于我写的Pose类底层,我只定义了ZYX的固定旋转方式。同时,也说明了,同一个旋转矩阵,可能对应不同的旋转方式(如:欧拉旋转、固定旋转),不同的旋转欧拉角、甚至不同的旋转次序
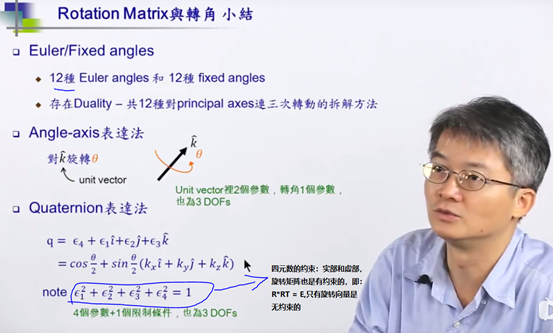
三、旋转矩阵小结
欧拉旋转和固定旋转的次序有效的排列组合为:12 = 3 * 2 * 2
姿态的数学形式有旋转矩阵(约束:RTR=E)、欧拉角(万向锁问题)、旋转向量(角轴)、四元数(约束norm(x y z w) = 1),所以VSLAM在对位姿进行优化的时候,
为了避免“带约束的优化”问题,一般都会采用旋转向量的形式作为姿态。
参考:
(台大机器人学之运动学——林沛群)
https://www.bilibili.com/video/BV1v4411H7ez?p=3
https://baike.baidu.com/item/%E6%97%8B%E8%BD%AC%E7%9F%A9%E9%98%B5/3265181?fr=aladdin#5
《jlblanco2010geometry3D_techrep.pdf》