Arbotix关节控制器的实现(十)
放在前面,主要自己记录备份,防止忘记
PyCharm Prosefessional版本的破解方法:
https://www.bilibili.com/read/cv7996882
怎么复制一台虚拟机到另外一台电脑上:
https://blog.csdn.net/csdnliuxin123524/article/details/80641649
RoboWare Studio安装教程:
https://blog.csdn.net/lixujie666/article/details/80139112
https://zhuanlan.zhihu.com/p/151031343
RoboWare Studio入门教程(一)
https://blog.csdn.net/renyuanxingxing/article/details/83218009
如何让英文roboware变成中文版
https://blog.csdn.net/yeluoyeqiushui/article/details/109186864
问题解决-----解决ROS程序注册(source devel/setup.bash)只在当前终端生效的问题:
https://blog.csdn.net/qq_42451251/article/details/105046317
关于发布者和订阅者的实现:
https://zhuanlan.zhihu.com/p/151031343
发布者信息:
订阅者信息:

实现消息的传输了!
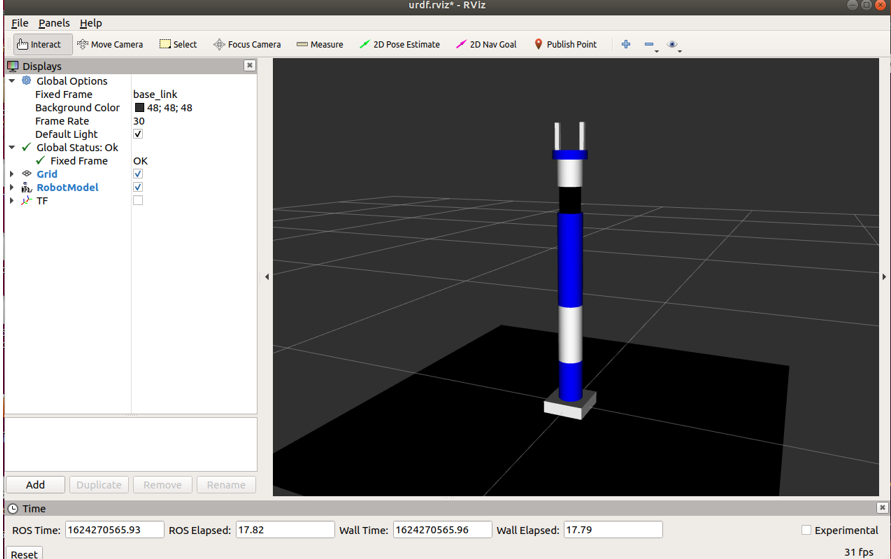
最初,加载出模型:
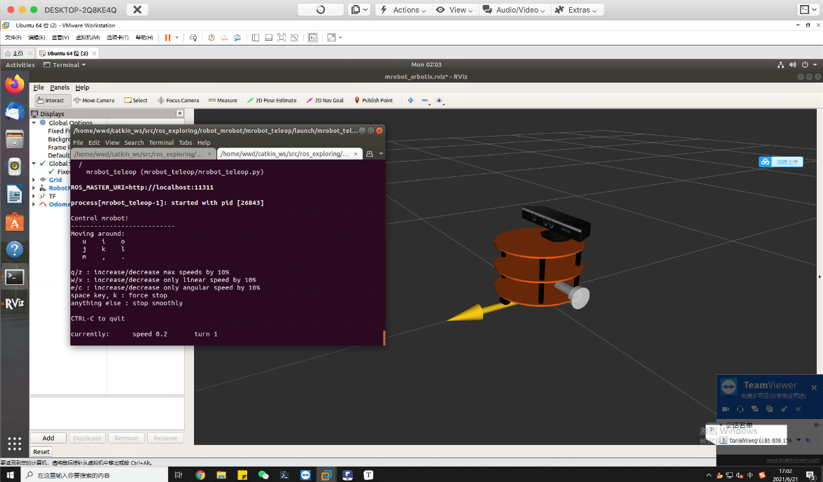
机器人开始平滑运动,到达指定位姿后停止,如图所示,还有关节的坐标信息。

另一个模型的Arbotix:
问题1: cannot launch node of type [arbotix_python/arbotix_driver]: arbotix_python
解决办法:安装包arbotix:
1 sudo apt-get install ros-melodic-arbotix
问题2: trajectory_ demo.py 报没有执行权限错误
解决办法: 给这个python文件增加一个执行权限:
1 chmod +x trajectory_ demo.py