1. 单源最短路径
1.1 Dijkstra算法
给定一个有向图G = (V,E),每条边(i,j)上都标有非负实数C[i][j]作为它的权;在图中指定一个顶点v作为源点,求从v到其他每个顶点的最短路径长度。
为求最短路径,Dijkstra提出按路径长度的递增次序,逐步产生最短路径的“贪心”算法。权定义如下:
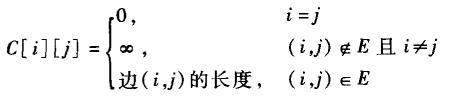
算法要点如下:
- 将V分成两个集合S(开始只有源点1)和V-S。其中,S是最短路径已经确定的顶点集合;V-S是最短路径尚未确定的顶点集合。每一步从V-S中选一个顶点w加入S,使得S中从源点到其余顶点的路长最短,直到V-S为空为止。
- 设数组D记录从源点到其余各顶点的最短路径长度,则w可归纳选取如下:
- 归纳基点:令S包含源点1;D[i]=C[1][i]
- 归纳假设:设S包含k个顶点,其中v1=1,并且D[v1],D[v2]...D[vk]最小
- 归纳选取:在V-S中选取一个顶点w,使经过{v1,v2...vk}中某个顶点而到达w的路径长度最短
D[w]=min(D[v]+C[v][w],其中v是S中,w是V-S中)
代码如下:
void Dijkstra(C)
{
S = {1};
for(i=2;i<=n;i++) {
D[i] = C[1][i];
}
for(i=1;i<=n-1;i++) {
从V-S中选出一个w使得D[w]最小;
把w加入S;
for(V-S中每个顶点v)
D[v] = min(D[v],D[w]+C[w][v]);
}
}
1.2 Bellman-Ford算法
采用邻接表
先介绍一下松弛技术。对于每个结点v来说,我们维持一个属性v.d,用来记录从源结点s到结点v的最短路径权重的上界。我们称其为最短路径估计。
先初始化:
INITIALIZE-SINGLE-SOURCE(s) {
for each vertex v in V
v.d = infinity;
s.d = 0;
}
进行松弛:
//w存储着边长,s为源点
RELAX(u,v,w) {
if v.d > u.d + w(u,v)
v.d = u.d + w(u,v);
}
//经过松弛后,改善了v点的最短路径估计
Bellman-Ford算法:
BELLMAN_FORD(w,s) {
INITIALIZE-SINGLE-SOURCE(s);
for i = 1 to |V| - 1
for each edge(u,v)
RELAX(u,v,w);
for each edge(u,v)
if(v.d > v.d+w(u,v))
cout << "you fu huan lu a!";
}
2. 每一对顶点的最短路径
2.1 FLoyd算法
为了求出每一对顶点之间的最短路径,可以令图中的每个顶点作为源点,n次重复利用Dijkstra算法即可,复杂性为O(n3)。但对每对顶点间的最短路径的更直接的算法是利用Floyd算法。虽然其时间复杂性也是一样,但是步骤很简单。而且实际效率也更高
Floyed对邻接矩阵进行处理,其定义和Dijstra一样。定义A[i][j]是i到j的最短路径长度,P[i][j]来记录经过的顶点。
-
原理:对矩阵A共进行n遍处理。令i为矩阵A的行下标,表示一条路径的起点;j为列下标,表示终点,当第k遍处理时,A[i][j]的值由如下公式确定:
Ak[i][j] = min{ Ak-1[i][j], Ak-1[i][k] + Ak-1[k][j] } -
代码
void Floyd(A,C,n)
{
for(i=1;i<=n;i++) {
for(j=1;j<=n;j++) {
A[i][j] = C[i][j];
P[i][j] = 0;
}
}
for(k=1;k<=n;k++) {
for(i=1;i<=n;i++) {
for(j=1;j<=n;j++) {
if(A[i][k] + A[k][j] < A[i][j]) {
A[i][j] = A[i][k]+A[k][j];
P[i][j] = k;
}
}
}
}
}
void Path(i,j)
{
k = P[i][j];
if(k!=0) {
Path(i,k);
cout << k << endl;
Path(k,j);
}
}
2.2 Warshall算法
这个算法主要是用于求两个点是否是可达的,即判断i到j是否有一条有向路径
这里邻接矩阵的定义为:
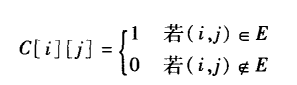
自己到自己是可达的
矩阵A,有一条路径从i到j时,A[i][j]=1;否则,就有A[i][j]=0。通常把矩阵A称为邻接矩阵C的传递闭包。用C0表示邻接矩阵,以后每次加入一个顶点来构造C1,C2...Cn。
有两个规则:
- 如果A[i][j]在Ck-1中为1,则在Ck中也为1
- 如果A[i][j]在Ck-1中为0,当且仅当A[i][k]和A[k][j]都为1时,A[i][j]在Ck中才变为1
只需对Floyd算法稍作修改:
初始化A[i][j]为邻接矩阵
for(k=1;k<=n;k++) {
for(i=1;i<=n;i++) {
for(j=1;j<=n;j++) {
A[i][j] = A[i][j] ∪ (A[i][k] ∩ A[k][j]) ;
}
}
}
Dijkstra算法是贪心策略,所以图中不能有负权值的边,FLoyd-WarShall算法为动态规划策略,故可以存在负权值的边,但是不能有负权值的环路,而Bellman-Ford允许有负权值的边,且当图中有负权值的环路时会检测出来。
3. 有向图的中心点
设d[i][j]表示从i到j的最短距离。对于任意一个顶点k,称:
E(k) = max{ d[i][j] },其中i in V
为顶点k的偏心度。而称偏心度最小的顶点为中心点。
直接利用Floyd算法即可算出