配置环境:OpenCv3.4, vs2013(x64),Win7。
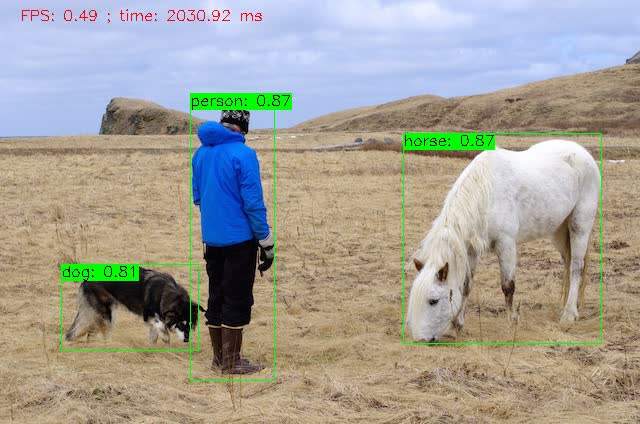
用OpenCv dnn module 实时检测摄像头,视频和图像的分类示例
原代码为:https://docs.opencv.org/3.4.0/da/d9d/tutorial_dnn_yolo.html,
https://github.com/pjreddie/darknet/tree/master/data,可以下载分类文件。根据不同的model,选择不同的names。
https://pjreddie.com/darknet/yolo/,可下载model的cfg文件和weights文件。
// Brief Sample of using OpenCV dnn module in real time with device capture, video and image. #include <opencv2/dnn.hpp> #include <opencv2/dnn/shape_utils.hpp> #include <opencv2/imgproc.hpp> #include <opencv2/highgui.hpp> #include <fstream> #include <iostream> #include <algorithm> #include <cstdlib> using namespace std; using namespace cv; using namespace cv::dnn; static const char* about = "This sample uses You only look once (YOLO)-Detector (https://arxiv.org/abs/1612.08242) to detect objects on camera/video/image. " "Models can be downloaded here: https://pjreddie.com/darknet/yolo/ " "Default network is 416x416. " "Class names can be downloaded here: https://github.com/pjreddie/darknet/tree/master/data "; static const char* params = "{ help | false | print usage }" "{ cfg | model_cfg/yolo.cfg | model configuration }" //模型配置文件 "{ model | model_weights/yolo.weights | model weights }" //模型权重文件 "{ camera_device | 0 | camera device number}" //摄像头 "{ source | pic/person.jpg | video or image for detection}" 图片路径 "{ save | | file name output}" //可设置保存文件路径 "{ fps | 3 | frame per second }" "{ style | box | box or line style draw }" "{ min_confidence | 0.24 | min confidence }" //最小置信阀值 "{ class_names | names/coco.names | File with class names, [PATH-TO-DARKNET]/data/coco.names }"; //分类文件
int main(int argc, char** argv) { CommandLineParser parser(argc, argv, params); if (parser.get<bool>("help")) { cout << about << endl; parser.printMessage(); return 0; } String modelConfiguration = parser.get<String>("cfg"); String modelBinary = parser.get<String>("model"); dnn::Net net; try { //! [Initialize network] net = readNetFromDarknet(modelConfiguration, modelBinary); //! [Initialize network] } catch (cv::Exception& e) { std::cerr << "Exception: " << e.what() << std::endl; if (net.empty()) { cerr << "Can't load network by using the following files: " << endl; cerr << "cfg-file: " << modelConfiguration << endl; cerr << "weights-file: " << modelBinary << endl; cerr << "Models can be downloaded here:" << endl; cerr << "https://pjreddie.com/darknet/yolo/" << endl; exit(-1); } } VideoCapture cap; VideoWriter writer; int codec = CV_FOURCC('M', 'J', 'P', 'G'); double fps = parser.get<float>("fps"); if (parser.get<String>("source").empty()) { int cameraDevice = parser.get<int>("camera_device"); cap = VideoCapture(cameraDevice); if (!cap.isOpened()) { cout << "Couldn't find camera: " << cameraDevice << endl; return -1; } } else { cap.open(parser.get<String>("source")); if (!cap.isOpened()) { cout << "Couldn't open image or video: " << parser.get<String>("video") << endl; return -1; } } if (!parser.get<String>("save").empty()) { writer.open(parser.get<String>("save"), codec, fps, Size((int)cap.get(CAP_PROP_FRAME_WIDTH), (int)cap.get(CAP_PROP_FRAME_HEIGHT)), 1); } vector<String> classNamesVec; ifstream classNamesFile(parser.get<String>("class_names").c_str()); if (classNamesFile.is_open()) { string className = ""; while (std::getline(classNamesFile, className)) classNamesVec.push_back(className); } String object_roi_style = parser.get<String>("style"); for (;;) { Mat frame; cap >> frame; // get a new frame from camera/video or read image if (frame.empty()) { waitKey(); break; } if (frame.channels() == 4) cvtColor(frame, frame, COLOR_BGRA2BGR); //! [Prepare blob] Mat inputBlob = blobFromImage(frame, 1 / 255.F, Size(416, 416), Scalar(), true, false); //Convert Mat to batch of images //! [Prepare blob] //! [Set input blob] net.setInput(inputBlob, "data"); //set the network input //! [Set input blob] //! [Make forward pass] Mat detectionMat = net.forward("detection_out"); //compute output //! [Make forward pass] vector<double> layersTimings; double tick_freq = getTickFrequency(); double time_ms = net.getPerfProfile(layersTimings) / tick_freq * 1000; putText(frame, format("FPS: %.2f ; time: %.2f ms", 1000.f / time_ms, time_ms), Point(20, 20), 0, 0.5, Scalar(0, 0, 255)); float confidenceThreshold = parser.get<float>("min_confidence"); for (int i = 0; i < detectionMat.rows; i++) { const int probability_index = 5; const int probability_size = detectionMat.cols - probability_index; float *prob_array_ptr = &detectionMat.at<float>(i, probability_index); size_t objectClass = max_element(prob_array_ptr, prob_array_ptr + probability_size) - prob_array_ptr; float confidence = detectionMat.at<float>(i, (int)objectClass + probability_index); if (confidence > confidenceThreshold) { float x_center = detectionMat.at<float>(i, 0) * frame.cols; float y_center = detectionMat.at<float>(i, 1) * frame.rows; float width = detectionMat.at<float>(i, 2) * frame.cols; float height = detectionMat.at<float>(i, 3) * frame.rows; Point p1(cvRound(x_center - width / 2), cvRound(y_center - height / 2)); Point p2(cvRound(x_center + width / 2), cvRound(y_center + height / 2)); Rect object(p1, p2); Scalar object_roi_color(0, 255, 0); if (object_roi_style == "box") { rectangle(frame, object, object_roi_color); } else { Point p_center(cvRound(x_center), cvRound(y_center)); line(frame, object.tl(), p_center, object_roi_color, 1); } String className = objectClass < classNamesVec.size() ? classNamesVec[objectClass] : cv::format("unknown(%d)", objectClass); String label = format("%s: %.2f", className.c_str(), confidence); int baseLine = 0; Size labelSize = getTextSize(label, FONT_HERSHEY_SIMPLEX, 0.5, 1, &baseLine); rectangle(frame, Rect(p1, Size(labelSize.width, labelSize.height + baseLine)), object_roi_color, CV_FILLED); putText(frame, label, p1 + Point(0, labelSize.height), FONT_HERSHEY_SIMPLEX, 0.5, Scalar(0, 0, 0)); } } if (writer.isOpened()) { writer.write(frame); } imshow("YOLO: Detections", frame); if (waitKey(1) >= 0) break; } return 0; } // main