之前我们提到mstraj函数并不是不是对坐标系旋转进行插值的理想方式。
在机器人学中,我们经常需要对姿态进行插值。例如,我们需要机器人的末端执行器平滑地从姿态 和改变到 。假设某个函数 ,其中 ,可以看做是一条归一化了的路径,函数的边界条件为 ,,而且 要能平滑地经过 内定义的一系列中间位姿。我们之间已经了解了多种位姿的描述方式,我们不妨分别讨论。
如果位姿由正交旋转矩阵表示,,如果用简单的线性插值 。但这是不可行的,这样插值后得到的通常不再是有效的正交矩阵,因为正交矩阵必须满足的列向量范数为1以及列向量之间正交的条件。
一般是选择三角度表示法,如欧拉角或横滚-俯仰-偏航角,,这样就可以使用线性插值法:
例如,我们定义了两个姿态:
>> R0 = rotz(-1) * roty(-1);
>> R1 = rotz(1) * roty(1);
得到等价横滚-俯仰-偏航角:
>> rpy0 = tr2rpy(R0);
>> rpy1 = tr2rpy(R1);
然后分50个时间步在它们之间生成一条轨迹:
>> rpy = mtraj(@tpoly, rpy0, rpy1, 50);
通过动画演示,很容易观察轨迹变化过程(rpy是一个 矩阵,而rpy2tr的结果是 矩阵。):
>> tranimate(rpy2tr(rpy));
由于姿态变化较大,可以看出坐标系的旋转轴线沿轨迹的变化。这个动作虽然平滑,但有时看起来也不太协调。另外,如果在所采用的三角度系统中有 或 与之一接近奇异点,也会出现问题。
采用单位四元数的插值法只比三角度向量法复杂一点点,它在空间中产生一个绕固定轴旋转的姿态变化。首先,我们利用机器人工具箱函数找到与这两个位姿等价的四元数:
>> q0 = Quaternion(R0);
>> q1 = Quaternion(R1);
然后对它们进行插值并进行动画演示:
>> q = interp(q0, q1, [0:49]'/49);
>> about(q)
q [Quaternion] : 1x50 (1.6 kB)
>> tranimate(q)
四元数插值法是通过使用球形线性插值(slerp)来实现的,其中单位四元数要在一个四维超球面上沿一个大圆路径运动。而在三维空间中的结果就是绕定轴的转动。
笛卡尔运动
另一个常见的需求是在 中生成两位姿之间的光滑路径,它同时涉及位置及姿态的变化。在机器人学中这通常被称作笛卡儿运动。我们将初始和最终位姿都表示成齐次变换矩阵:
>> T0 = transl(0.4, 0.2, 0) * trotx(pi);
>> T1 = transl(-0.4, -0.2, 0.3) * troty(pi/2) * trotz(-pi/2);
工具箱函数trinterp提供了沿路径单位化距离 中的位姿插值。例如,其中间的位姿是
>> trinterp(T0, T1, 0.5)
ans =
0.6667 -0.3333 0.6667 0
-0.6667 -0.6667 0.3333 0
0.3333 -0.6667 -0.6667 0.1500
0 0 0 1.0000
其中平移部分是用线性插值,旋转部分是用四元数插值法interp进行球形插值。
两个位姿之间 个分步的轨迹可用以下方法生成:
>> Ts = trinterp(T0, T1, [0:49]'/49);
参数分别对应的是起点和终点的位姿,以及从 到 线性变化的路径长度。由此产生的轨迹Ts是一个三维矩阵:
>> about(Ts)
Ts [double] : 4x4x50 (6.4 kB)
代表的是每个时间分步(第三个指数 )对应的齐次变换矩阵(前两个指数 )。其中,路径上第一点的齐次变换是:
>> Ts(:,:,1)
ans =
1.0000 0 0 0.4000
0 -1.0000 0 0.2000
0 0 -1.0000 0
0 0 0 1.0000
最简单直观的表现方法仍然是通过动画:
>> tranimate(Ts)
它将展现出坐标系从位姿T1平移、旋转到位姿T2的变化过程。
该轨迹的平移部分由以下方式获得:
>> P = transl(Ts);
它将以矩阵形式返回轨迹的笛卡儿位置坐标:
>> about(P)
P [double] : 50x3 (1.2 kB)
可以看出,P有 行 列,每一行对应每个时间分步上的位置向量。
位置向量的变化可以用plot 函数画出:
>> plot(P)
以横滚-俯仰-偏摆角格式画的姿态变化曲线:
>> rpy = tr2rpy(Ts);
>> plot(rpy);
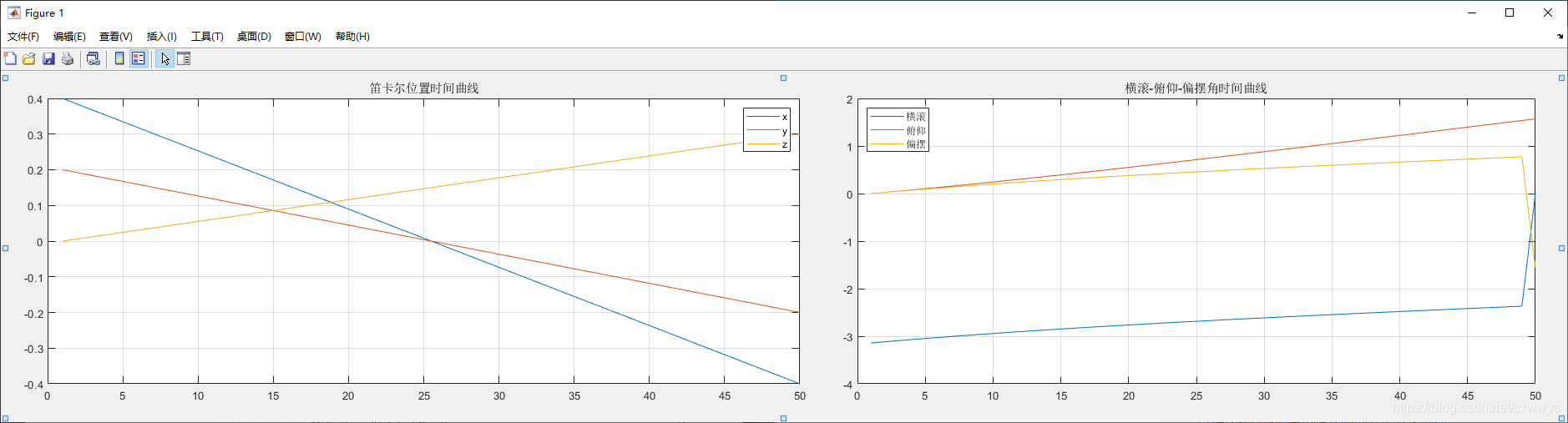
从图中看到,位置坐标随时间的变化既平滑又呈线性,而姿态随时间的变化也平滑,但不是线性的。横滚-俯仰-偏航角之所以不呈现时间线性,因为它们是对线性变化的四元数进行非线性变换的结果。最后两个点之间的不连续性,是因为对于横滚-俯仰一偏航角,其最终姿态是一个奇异点。
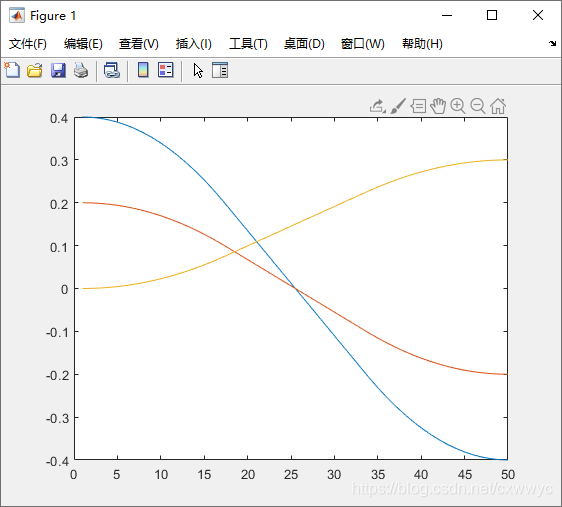
然而,平移运动在第一个和最后一个点上的速度和加速度是不连续的。问题在于虽然轨迹在空间中是平滑的,但沿轨迹的步距 在时间上并不平滑。路径起点上的速度值从零跳跃到有限值,然后在终点又突降至零——没有相应的起始加速和结束减速。我们可以用前面讨论过的标量函数tpoly和lspb来创建一个时间上平滑的 ,这样沿路径的运动也平滑了。我们只需将传递给trinterp的第三个参数更改为一个沿路径的单位化距离向量即可:
>> Ts = trinterp(T0, T1, lspb(0, 1, 50))
这样做对于轨迹是不变的,但这时坐标系会沿路径逐渐加速到一个恒定速度,然后结束时再减速,这一点可以从下图中轨迹姿态部分较光滑的曲线反映出来。
工具箱中还提供了一个方便的速记函数ctraj来进行轨迹插值,其中的参数是初始和最终的位姿,以及分步数量。:
>> Ts = ctraj(T0, T1, 50);