CoreMotion (加速仪与陀螺仪)
主要是使用 CMMotionManager
iOS中的主要传感器:
@ | 加速度传感器 | 电子罗盘 | 陀螺仪 | 接近传感器
------------ | ------------- | ------------ | ------------
功能 | 通过测量三个轴的加速度大小来判断人体运动 | 通过测量设备周围地磁场的强度和方向来判断朝向 | 通过测量三个轴的旋转速率来判断朝向 | 无须物理接触就判断附近物体的存在
主要局限性 | 受重力干扰大,瞬时误差大 | 误差大, 容易受其他磁场和金属物体影响。主要用于校正其他设备 | 误差会累积,长时间读数的准确性差 |不通用,大多数只针对几种材质
应用 | 活动测量 | 导航 | 导航 | 智能省电
加速仪 (类型:CMAcceleration)
简介:
加速仪可以检测三维空间中的加速度 ,坐标对应如下:
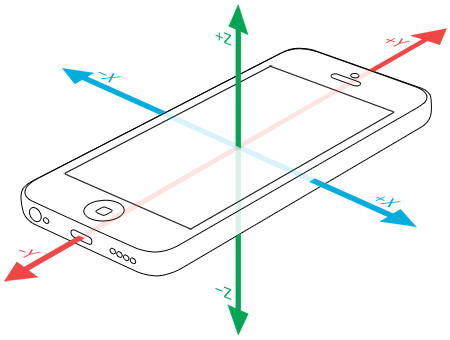
例如:当垂直手持手机且顶部向上,Y坐标上回收到 -1G的加速度。
陀螺仪 (类型:CMRotationRate)
简介:
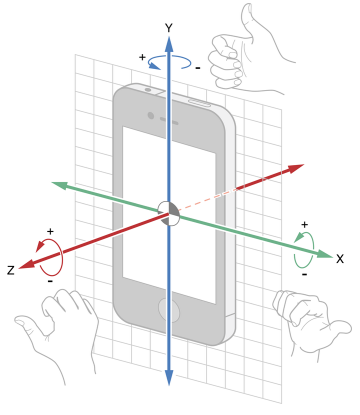
陀螺仪用于检测设备绕XYZ轴转动的速度,坐标对应如下:
deviceMotion
包含下面四种数据:
attitude(类型:CMAttitude)- 返回设备的方位信息,包含roll 、pitch、yaw三个欧拉角的值
roll: 设备绕 Z 轴转过的角度pitch: 设备绕 X 轴转过的角度yaw: 设备绕 Y 轴转过的角度
-
rotationRate(类型:CMRotationRate)- 经过滤波操作之后的陀螺仪数据,即 静止时,三个方向的转动速度接近于0;
-
gravity(类型:CMAcceleration)- 返回重力对设备在三个方向上的加速度
- 即重力加速度矢量在当前设备的参考坐标系中的表达,开发中不再需要通过滤波来提取这个信息
-
userAcceleration(类型:CMAcceleration)- 返回用户对设备在三个方向上的加速度
- 不再需要滤波,但根据程序需求而加的滤波算法可以保留
示例:
数据获取方式有两种:主动获取(pull),基于代码块获取(push)
主动获取
-(void)viewDidLoad
{
[super viewDidLoad];
// 创建CMMotionManager对象
self.motionManager = [[CMMotionManager alloc] init]; // ①
// 如果CMMotionManager的支持获取加速度数据
if (self.motionManager.accelerometerAvailable)
{
[self.motionManager startAccelerometerUpdates];
}
else
{
NSLog(@"该设备不支持获取加速度数据!");
}
// 如果CMMotionManager的支持获取陀螺仪数据
if (self.motionManager.gyroAvailable)
{
[self.motionManager startGyroUpdates];
}
else
{
NSLog(@"该设备不支持获取陀螺仪数据!");
}
// 如果CMMotionManager的支持获取磁场数据
if (self.motionManager.magnetometerAvailable)
{
[self.motionManager startMagnetometerUpdates];
}
else
{
NSLog(@"该设备不支持获取磁场数据!");
}
}
-(void)viewWillAppear:(BOOL)animated
{
[super viewWillAppear:animated];
// 启动定时器来周期性地轮询加速度、陀螺仪、磁场数据
updateTimer = [NSTimer scheduledTimerWithTimeInterval:0.1
target:self selector:@selector(updateDisplay)
userInfo:nil repeats:YES]; // ②
}
-(void)updateDisplay
{
// 如果CMMotionManager的加速度数据可用
if (self.motionManager.accelerometerAvailable)
{
// 主动请求获取加速度数据
CMAccelerometerData* accelerometerData = self.motionManager.accelerometerData;
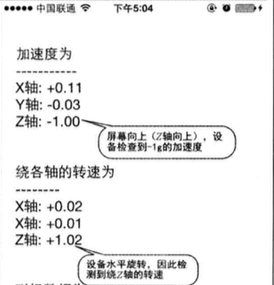
self.accelerometerLabel.text = [NSString stringWithFormat:
@"加速度为
-----------
X轴: %+.2f
Y轴: %+.2f
Z轴: %+.2f",
accelerometerData.acceleration.x,
accelerometerData.acceleration.y,
accelerometerData.acceleration.z];
}
// 如果CMMotionManager的陀螺仪数据可用
if (self.motionManager.gyroAvailable)
{
// 主动请求获取陀螺仪数据
CMGyroData* gyroData = self.motionManager.gyroData;
self.gyroLabel.text = [NSString stringWithFormat:
@"绕各轴的转速为
--------
X轴: %+.2f
Y轴: %+.2f
Z轴: %+.2f",
gyroData.rotationRate.x,
gyroData.rotationRate.y,
gyroData.rotationRate.z];
}
// 如果CMMotionManager的磁场数据可用
if (self.motionManager.magnetometerAvailable)
{
// 主动请求获取磁场数据
CMMagnetometerData* magnetometerData = self.motionManager.magnetometerData;
self.magnetometerLabel.text = [NSString stringWithFormat:
@"磁场数据为
--------
X轴: %+.2f
Y轴: %+.2f
Z轴: %+.2f",
magnetometerData.magneticField .x,
magnetometerData.magneticField .y,
magnetometerData.magneticField .z];
}
}
结果如下:
基于代码块获取
self.motionManager = [[CMMotionManager alloc]init];
if (_motionManager.isDeviceMotionAvailable) {
//更新数据频率
_motionManager.deviceMotionUpdateInterval = 1/60 ;
TestViewController * __weak weakSelf = self;
NSOperationQueue *queue = [[ NSOperationQueue alloc]init];
[_motionManager startDeviceMotionUpdatesToQueue:queue withHandler:^(CMDeviceMotion * _Nullable motion, NSError * _Nullable error) {
double userX = motion.userAcceleration.x;
double userY = motion.userAcceleration.y;
//...
[[NSOperationQueue mainQueue] addOperationWithBlock:^{
//更新UI
}];
}];
}
简单应用
图片无论在设备如何倾斜的情况下都保持水平
RotationViewController * __weak weakSelf = self;if (manager.accelerometerAvailable) {
manager.accelerometerUpdateInterval = 0.01f;
[manager startAccelerometerUpdatesToQueue:[NSOperationQueue mainQueue]
withHandler:^(CMAccelerometerData *data, NSError *error) {
double rotation = atan2(data.acceleration.x, data.acceleration.y) - M_PI;
weakSelf.imageView.transform = CGAffineTransformMakeRotation(rotation);
}];
}
结果如下:
敲击手掌的时候实现导航返回
ClunkViewController * __weak weakSelf = self;if (manager.deviceMotionAvailable) {
manager.deviceMotionUpdateInterval = 0.01f;
[manager startDeviceMotionUpdatesToQueue:[NSOperationQueue mainQueue]
withHandler:^(CMDeviceMotion *data, NSError *error) {
if (data.userAcceleration.x < -2.5f) {
[weakSelf.navigationController popViewControllerAnimated:YES];
}
}];
}
结果如下:
旋转改变页面
double showPromptTrigger = 1.0f;
double showAnswerTrigger = 0.8f;
+(double)magnitudeFromAttitude:(CMAttitude *)attitude {
return sqrt(pow(attitude.roll, 2.0f) + pow(attitude.yaw, 2.0f) + pow(attitude.pitch, 2.0f));
}
FacingViewController * __weak weakSelf = self;if (manager.deviceMotionAvailable) {
[manager startDeviceMotionUpdatesToQueue:[NSOperationQueue mainQueue]
withHandler:^(CMDeviceMotion *data, NSError *error) {
// translate the attitude
[data.attitude multiplyByInverseOfAttitude:initialAttitude];
// calculate magnitude of the change from our initial attitude
double magnitude = [FacingViewController magnitudeFromAttitude:data.attitude];
// show the prompt
if (!showingPrompt && (magnitude > showPromptTrigger)) {
showingPrompt = YES;
PromptViewController *promptViewController = [weakSelf.storyboard instantiateViewControllerWithIdentifier:@"PromptViewController"];
promptViewController.modalTransitionStyle = UIModalTransitionStyleCrossDissolve;
[weakSelf presentViewController:promptViewController animated:YES completion:nil];
}
// hide the prompt
if (showingPrompt && (magnitude < showAnswerTrigger)) {
showingPrompt = NO;
[weakSelf dismissViewControllerAnimated:YES completion:nil];
}
}];
}
结果如下:

计算设备的位移
理论上设备一开始静止,就可以通过加速度和时间的值来计算设备的位移,(时间越长 误差越大),然是尝试了一下 做不到,误差太大,看来加速计做不了这么精细的活。。