1、MobileNet
随着对准确度的要求越来越高,网络也越来越深。因此既能保持模型性能(accuracy)也能降低模型大小(parameters size)、同时提升模型速度(speed, low latency)的MobileNet应运而生。
MobileNet的基本单元是深度可分离卷积(depthwise separable convolution),包括深度卷积(depthwise convolution)和点卷积(pointwise convolution)。传统卷积分成两步,每个卷积核与每张特征图进行按位相乘然后进行相加,计算量为DF∗DF∗DK∗DK∗M∗N,其中DF为特征图尺寸,DK为卷积核尺寸,M为输入通道数,N为输出通道数。而深度可分离卷积首先对应不同的通道使用不同的卷积核,进行按位相乘的计算,通道数不变;然后使用1*1的卷积核进行传统的卷积运算,此时通道数可以进行改变,其计算量为DK∗DK∗M∗DF∗DF+1∗1∗M∗N∗DF∗DF。

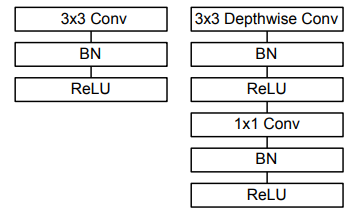
标准卷积和深度可分离卷积的基本结构如下所示,深度可分离卷积在深度卷积和点卷积后都应用了batchnorm和relu。
1 class Block(nn.Module): 2 '''Depthwise conv + Pointwise conv''' 3 def __init__(self, in_planes, out_planes, stride=1): 4 super(Block, self).__init__() 5 # Depthwise 卷积,3*3 的卷积核,分为 in_planes,即各层单独进行卷积 6 self.conv1 = nn.Conv2d(in_planes, in_planes, kernel_size=3, stride=stride, padding=1, groups=in_planes, bias=False) 7 self.bn1 = nn.BatchNorm2d(in_planes) 8 # Pointwise 卷积,1*1 的卷积核 9 self.conv2 = nn.Conv2d(in_planes, out_planes, kernel_size=1, stride=1, padding=0, bias=False) 10 self.bn2 = nn.BatchNorm2d(out_planes) 11 12 def forward(self, x): 13 out = F.relu(self.bn1(self.conv1(x))) 14 out = F.relu(self.bn2(self.conv2(out))) 15 return out

2、MobileNetV2
V2在V1的基础上,引入了Inverted Residuals和Linear Bottlenecks。
倒残差模块Inverted Residuals:在3x3网络结构前利用1x1卷积升维,在3x3网络结构后利用1x1卷积降维,先进行扩张,再进行压缩。ResNet里用的是残差模块,整个过程是“压缩-卷积-扩张”。这样做的目的是减少3*3模块的计算量,提高残差模块的计算效率。倒残差模块整个过程是“扩张-卷积-压缩”。因为depthwise卷积不能改变通道数,因此特征提取受限于输入的通道数,所以先提升通道数。
Linear Bottlenecks:为了避免Relu对低维特征的破坏,在最后一层不使用relu而使用线性激活函数,其它层仍然使用relu。

1 class Block(nn.Module): 2 '''expand + depthwise + pointwise''' 3 def __init__(self, in_planes, out_planes, expansion, stride): 4 super(Block, self).__init__() 5 self.stride = stride 6 # 通过 expansion 增大 feature map 的数量 7 planes = expansion * in_planes 8 self.conv1 = nn.Conv2d(in_planes, planes, kernel_size=1, stride=1, padding=0, bias=False) 9 self.bn1 = nn.BatchNorm2d(planes) 10 self.conv2 = nn.Conv2d(planes, planes, kernel_size=3, stride=stride, padding=1, groups=planes, bias=False) 11 self.bn2 = nn.BatchNorm2d(planes) 12 self.conv3 = nn.Conv2d(planes, out_planes, kernel_size=1, stride=1, padding=0, bias=False) 13 self.bn3 = nn.BatchNorm2d(out_planes) 14 15 # 步长为 1 时,如果 in 和 out 的 feature map 通道不同,用一个卷积改变通道数 16 if stride == 1 and in_planes != out_planes: 17 self.shortcut = nn.Sequential( 18 nn.Conv2d(in_planes, out_planes, kernel_size=1, stride=1, padding=0, bias=False), 19 nn.BatchNorm2d(out_planes)) 20 # 步长为 1 时,如果 in 和 out 的 feature map 通道相同,直接返回输入 21 if stride == 1 and in_planes == out_planes: 22 self.shortcut = nn.Sequential() 23 24 def forward(self, x): 25 out = F.relu(self.bn1(self.conv1(x))) 26 out = F.relu(self.bn2(self.conv2(out))) 27 out = self.bn3(self.conv3(out)) 28 # 步长为1,加 shortcut 操作 29 if self.stride == 1: 30 return out + self.shortcut(x) 31 # 步长为2,直接输出 32 else: 33 return out

3、HybridSN
HybirdSN的主要特点是采用了3-D-CNN与2-D-CNN相结合的方式,既降低了3-D-CNN的模型复杂度,又弥补了2-D-CNN无法提取光谱维度特征的缺点。
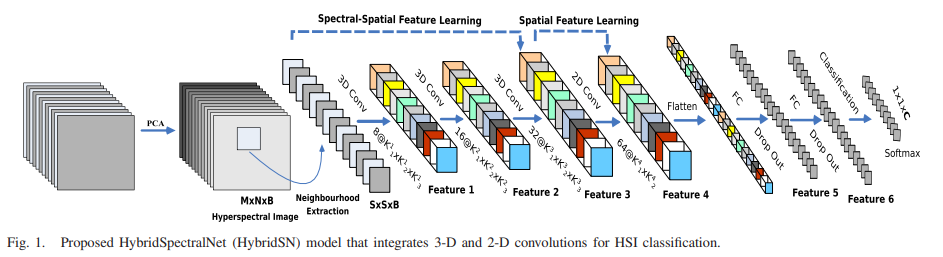
为了充分利用二维和三维cnn的特征自动学习能力,作者提出了HybridSN网络流程图如图所示,它包括三个三维卷积、一个二维卷积和三个完全连接的层。
- 三维卷积中,卷积核的尺寸为8×3×3×7×1、16×3×3×5×8、32×3×3×3×16(16个三维核,3×3×5维)
- 二维卷积中,卷积核的尺寸为64×3×3×576(576为二维输入特征图的数量)
三维卷积部分:
- conv1:(1, 30, 25, 25), 8个 7x3x3 的卷积核 ==>(8, 24, 23, 23)
- conv2:(8, 24, 23, 23), 16个 5x3x3 的卷积核 ==>(16, 20, 21, 21)
- conv3:(16, 20, 21, 21),32个 3x3x3 的卷积核 ==>(32, 18, 19, 19)
二维卷积:(576, 19, 19) 64个 3x3 的卷积核,得到 (64, 17, 17)
展平 flatten 操作,变为 18496 维的向量,接下来是256、128节点的全连接层,都使用比例为0.4的 Dropout,
最后输出为 16 个节点,是最终的分类类别数。
1 class HybridSN(nn.Module): 2 def __init__(self, num_classes=class_num): 3 super(HybridSN,self).__init__() 4 #先进行三维卷积 5 #conv1:(1, 30, 25, 25), 8个 7x3x3 的卷积核 ==>(8, 24, 23, 23) 6 self.conv1 = nn.Conv3d(1, 8, kernel_size=(7,3,3), stride=1, padding=0, bias=False) 7 self.bn1 = nn.BatchNorm3d(8) 8 #self.layers = self._make_layers(in_planes=32) 9 #conv2:(8, 24, 23, 23), 16个 5x3x3 的卷积核 ==>(16, 20, 21, 21) 10 self.conv2 = nn.Conv3d(8, 16, kernel_size=(5,3,3), stride=1, padding=0, bias=False) 11 self.bn2 = nn.BatchNorm3d(16) 12 #conv3:(16, 20, 21, 21),32个 3x3x3 的卷积核 ==>(32, 18, 19, 19) 13 self.conv3 = nn.Conv3d(16, 32, kernel_size=(3,3,3), stride=1, padding=0, bias=False) 14 self.bn3 = nn.BatchNorm3d(32) 15 16 #二维卷积:(576, 19, 19) 64个 3x3 的卷积核,得到 (64, 17, 17) 17 self.conv4 = nn.Conv2d(576, 64, kernel_size=(3,3), stride=1, padding=0) 18 self.bn4 = nn.BatchNorm2d(64) 19 #依次为256,128节点的全连接层,都使用比例为0.4的 Dropout 20 self.fc1 = nn.Linear(18496,256) 21 self.fc2 = nn.Linear(256,128) 22 self.dropout = nn.Dropout(p = 0.4) 23 self.fc3 = nn.Linear(128,num_classes) 24 25 def forward(self, x): 26 out = F.relu(self.bn1(self.conv1(x))) 27 out = F.relu(self.bn2(self.conv2(out))) 28 out = F.relu(self.bn3(self.conv3(out))) 29 #进行二维卷积,因此把前面的 32*18 reshape 一下,得到 (576, 19, 19) 30 out = out.reshape(out.shape[0],-1,19,19) 31 out = F.relu(self.bn4(self.conv4(out))) 32 #接下来是一个 flatten 操作,变为 18496 维的向量 33 out = out.view(out.size(0), -1) 34 out = F.relu(self.dropout(self.fc1(out))) 35 out = F.relu(self.dropout(self.fc2(out))) 36 out = F.relu(self.dropout(self.fc3(out))) 37 return out
二、总结
这三篇之前看过也忘了,再看一遍温故知新。
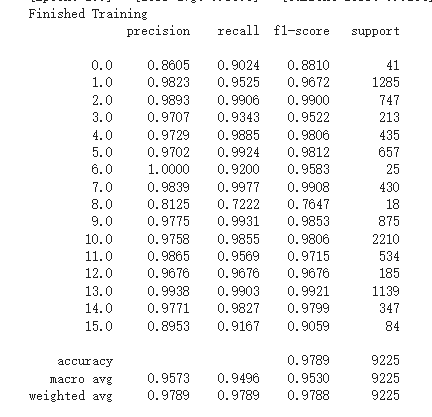
对HybridSN网络里添加了SENet,效果还不错。
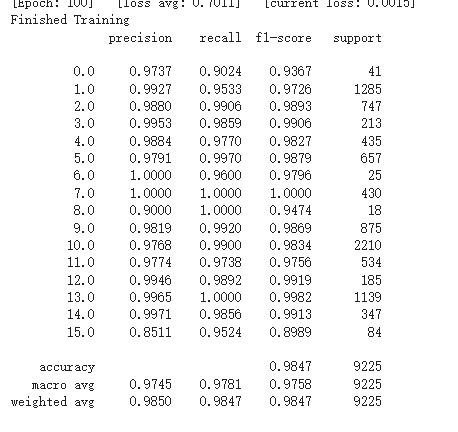
HybridSN网络分类结果不同的原因是测试时不应使用dropout层和BN层。训练模式:model.train()开启这两个层;测试模式:model.eval()关闭这两个层。dropout层在训练过程中以指定概率p使神经元失活,让它在这次的传播过程的输出为0。当预测时要使用所有神经元而且要乘以一个补偿系数。所以要指定当前是训练还是测试模式。BN层在测试的时候采用的是固定的mean和var,这俩固定的参数是在训练时统计计算得到的。因为这俩参数是在前向传播过程中计算的,所以在测试模式的时候你如果没有指定model.eval(),那么这俩参数还会根据你的测试数据更新,导致结果的参考价值不大。综上,如果网络中添加了BN层和dropout层而不使用model.eval()的话,每次测试的时候 模型并不是固定的,所以每次的分类结果并不一致。