nodes:节点,可执行文件,可以通过ros与其他节点进行通信(节点是一个能执行特定工作任 务的工作单元,并且能够相互通信,从而实现一个机器人系统整体的功能)
messages:ros的一种数据类型,用于订阅或者发布到一个话题
topics:话题,节点可以发布消息到话题
master:节点管理器,ros名称服务
rosout:ros中相当于stdout/stderr
roscore:主机+rosout+参数服务器
roscore启动
rosrun turtlesim turtlesim_node启动一个node
rosrun turtlesim turtle_teleop_key启动键盘控制(注意鼠标的聚焦点在这个terminal上)
rosrun rqt_graph rqt_graph打开显示当前系统运行的情况

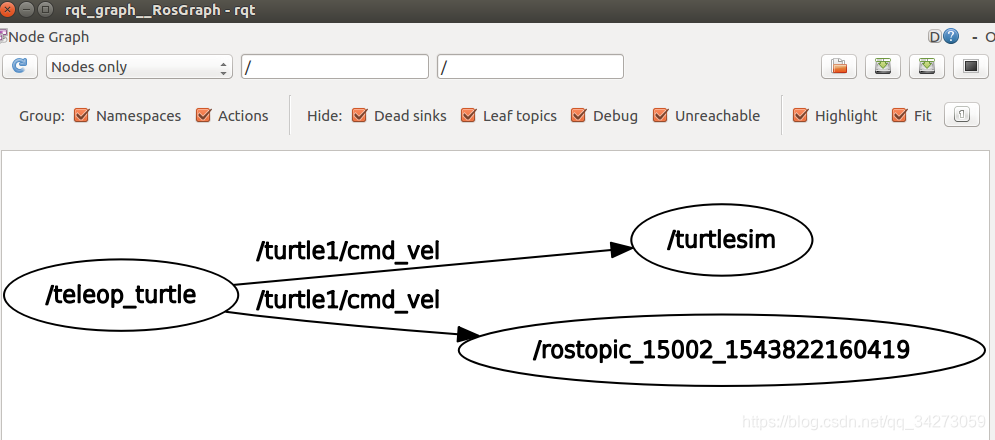
rostopic echo /turtle1/cmd_vel查看话题发布的数据
