概述
时钟相性与极性
CPOL(Clock Polarity)控制空闲状态时SCK的值:CPOL=0,空闲时SCK=0;CPOL=1,空闲时SCK=1。
CPHA(Clock Phase)控制何时捕获数据,CPHA=0,第一个跳变沿;CPHA=1,第二个跳变沿。详细见下图:

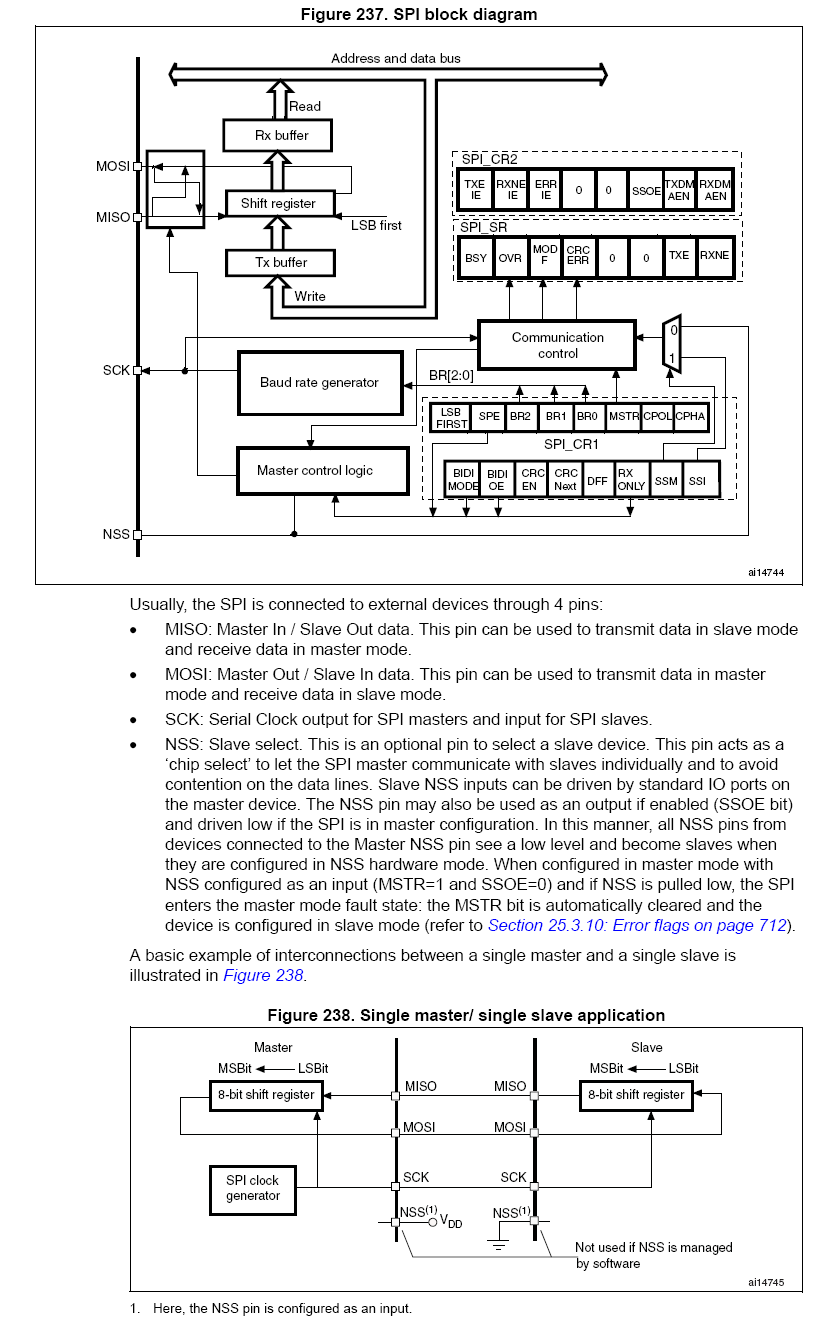
从选(NSS,也就是CS)管理管脚管理
- SSM = 1,软件管理NSS片选。两种方案:一个是把NSS设为普通IO口,使用GPIO的方法置高拉低;另一个是配置成复用口,使用SPI的寄存器CR1中的SSI位来控制NSS高低。
- SSM = 0, 硬件管理方法,推荐使用,有两种模式(SSOE在 SPI_CR2 里):
- NSS 输出使能,SSM=0,SSOE=1. 适合单个master通信使用,占据NSS片选线。
- NSS 输出禁止,SSM=0,SSOE=0. 释放NSS片选线,从而该总线的其他master设备可以进行通信。
举个例子:
目的:使用硬件的方法实现,主从通信,双向收发。
简述:master 向 slave 发生数据a 同时获取slave发送的数据b,数据a、b无误即实验成功。
操作:连线参照Figure 238. 即所有线一一对应相连,包括NSS(即CS)。
初始化及实验代码:
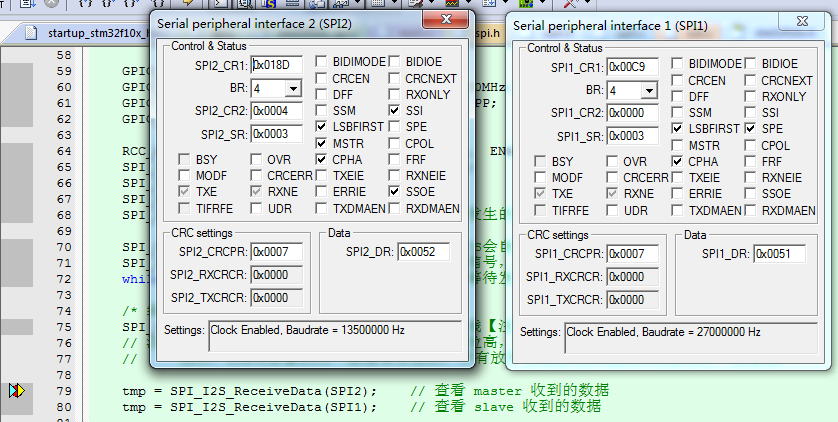
void init_spis(void) { GPIO_InitTypeDef GPIO_InitStructure; SPI_InitTypeDef SPI_InitStructure; static uint16_t tmp; /* configure master */ // SPI2_NSS PB12 // SPI2_SCK PB13 // SPI2_MISO PB14 // SPI2_MOSI PB15 RCC_APB2PeriphClockCmd( RCC_APB2Periph_GPIOB, ENABLE );//PORTA 时钟使能 GPIO_InitStructure.GPIO_Pin = GPIO_Pin_12 | GPIO_Pin_13 | GPIO_Pin_15; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //推挽输出 GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_Init(GPIOB, &GPIO_InitStructure); GPIO_InitStructure.GPIO_Pin = GPIO_Pin_14; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU; GPIO_Init(GPIOB, &GPIO_InitStructure); RCC_APB1PeriphClockCmd( RCC_APB1Periph_SPI2, ENABLE );//SPIx时钟使能 SPI_InitStructure.SPI_Mode = SPI_Mode_Master; // 其他设置与 slave 相同 SPI_InitStructure.SPI_Direction = SPI_Direction_2Lines_FullDuplex; SPI_InitStructure.SPI_DataSize = SPI_DataSize_8b; SPI_InitStructure.SPI_CPOL = SPI_CPOL_Low; SPI_InitStructure.SPI_CPHA = SPI_CPHA_2Edge; SPI_InitStructure.SPI_NSS = SPI_NSS_Hard; // 硬件管理 SPI_InitStructure.SPI_BaudRatePrescaler = SPI_BaudRatePrescaler_4; SPI_InitStructure.SPI_FirstBit = SPI_FirstBit_LSB; SPI_InitStructure.SPI_CRCPolynomial = 7; SPI_Init(SPI2, &SPI_InitStructure); SPI2->CR2 |= SPI_CR2_SSOE; // 使用硬件NSS,需要把SSOE(SS Output enable)使能 /* configure slave */ // SPI1_NSS PA4 // SPI1_SCK PA5 // SPI1_MISO PA6 // SPI1_MOSI PA7 RCC_APB2PeriphClockCmd( RCC_APB2Periph_GPIOA, ENABLE );//PORTA 时钟使能 GPIO_InitStructure.GPIO_Pin = GPIO_Pin_4 | GPIO_Pin_5 | GPIO_Pin_7; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU; GPIO_Init(GPIOA, &GPIO_InitStructure); GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6; GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; GPIO_Init(GPIOA, &GPIO_InitStructure); RCC_APB2PeriphClockCmd( RCC_APB2Periph_SPI1, ENABLE );//SPIx时钟使能 SPI_InitStructure.SPI_Mode = SPI_Mode_Slave; // 其他设置与 master 相同 SPI_Init(SPI1, &SPI_InitStructure); SPI_Cmd(SPI1, ENABLE); SPI_I2S_SendData(SPI1, 0x52); // slave 要发生的数据 SPI_Cmd(SPI2, ENABLE); // 使能SPI外设,此时CS会自动拉低,但是没有CLK信号。 SPI_I2S_SendData(SPI2, 0x51); // 产生 CLK信号,启动传输 while((SPI2->SR & SPI_SR_TXE) == 0); // 等待发送完毕 /* 结束通信 */ SPI_Cmd(SPI2, DISABLE); // 传输结束,释放总线【注】,CLK进入IDLE状态(我设置的高) // 注:释放总线,即开漏的控制方式,不是强制拉高,只是相当于断开与CS(NSS)的连接。 // 当然,slave设备的CS一般是有上拉的,所有放开后在没有其他master控制时,就是高。 tmp = SPI_I2S_ReceiveData(SPI2); // 查看 master 收到的数据 tmp = SPI_I2S_ReceiveData(SPI1); // 查看 slave 收到的数据 }
实验结果