在OpenGL中,存在着至少存在着三种矩阵,对应着函数glMatrixMode()的三个参数:GL_MODELVIEW,GL_PROJECTION,GL_TEXTURE。
以下主要描述GL_MODELVIEW(模型视图矩阵)的个人理解。
在OpenGL中空间中点的三维坐标是使用行向量表示的,虽然与列向量相比存储结构并没有发生变化,但在坐标变换(即矩阵乘法)中会有很大不同。大家都知道一个4X4的矩阵可以表示三维坐标的平移,旋转变换。例如一矩阵R表示一个旋转加平移变换,空间中一点P(x, y, z),如果坐标使用列向量表示,则变换过程为

如果坐标使用行向量表示,则变换过程为上述矩阵的转置

因此,OpenGL中变换矩阵采用的是右乘的方式,并且其需要的变换矩阵其实是真正变换矩阵的转置(前提是矩阵在数组中采取的是以行为主的形式,即先存储完矩阵的一行,接下来再存储矩阵的下一行)。
函数glLoadMatrixf(const GLfloat *m)输入的矩阵其实是变换矩阵R的转置 。
。
如果先后对空间中一点P(x, y, z)作多次变换,设先后的变换矩阵分别为A,B,C,则在OpenGL中应当如何输入变换矩阵呢?当坐标使用列向量表示时,变换过程为

当坐标使用行向量表示时,变换过程为

因此,OpenGL中,最先变换的矩阵应当最后与当前矩阵相乘,并且乘的是变换矩阵的转置。下面我以一个例子来说明上述变换。注意下面描述中的x,y,z轴实际上指的是相机坐标系中的U,V,N轴。OpenGL中,屏幕中所呈现的视平面其实是UOV平面,屏幕上方为V轴正方向,屏幕右方为U轴正方向,屏幕由里到外为N轴正方向。因此视线方向总是沿N轴负方向。
函数rotate(float angle, float x, float y, float z)是让坐标点绕向量(x, y, z)旋转angle角度,旋转方向符合右手螺旋定则。函数translate(float x, float y, float z)是让坐标点沿向量(x, y, z)平移其模长的距离。上述两个函数生成的都是变换矩阵的转置,并且实现的都是 ,其中M是当前矩阵,R是变换矩阵。
,其中M是当前矩阵,R是变换矩阵。
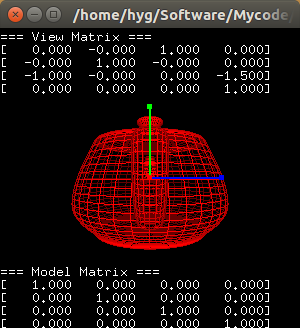
1 matrixView.identity(); //transform matrixView to an identity 2 matrixView.translate(0, 0, -r); 3 glLoadMatrixf(matrixView.get());
上述矩阵是由一个单位阵加沿负N轴的平移转换而成,假设在世界坐标系中有一茶壶,其中心位于世界坐标系的原点,在上述变换矩阵下如下图:

图中,红,绿,蓝箭头分别为世界坐标系的x,y,z轴。下面是让该茶壶先后沿x,y,z轴旋转90度的代码和结果截图
1 matrixView.identity(); //transform matrixView to an identity 2 matrixView.rotate(90, 1, 0, 0); //cameraAngleX 3 matrixView.translate(0, 0, -r); 4 glLoadMatrixf(matrixView.get());

1 matrixView.identity(); //transform matrixView to an identity 2 matrixView.rotate(90, 1, 0, 0); //cameraAngleX 3 matrixView.rotate(90, 0, 1, 0); //cameraAngleY 4 matrixView.translate(0, 0, -r); 5 glLoadMatrixf(matrixView.get());

1 matrixView.identity(); //transform matrixView to an identity 2 matrixView.rotate(90, 1, 0, 0); //cameraAngleX 3 matrixView.rotate(90, 0, 1, 0); //cameraAngleY 4 matrixView.rotate(90, 0, 0, 1); //cameraAngleZ 5 matrixView.translate(0, 0, -r); 6 glLoadMatrixf(matrixView.get());