1.直接法的推导:
考虑某个空间点P和两个时刻的相机,P的世界坐标为[X,Y,Z],它在两个相机上成像,记非齐次像素坐标为(p_{1},p_{2}),目标是求第一个相机到第二个相机的相对位姿变换。
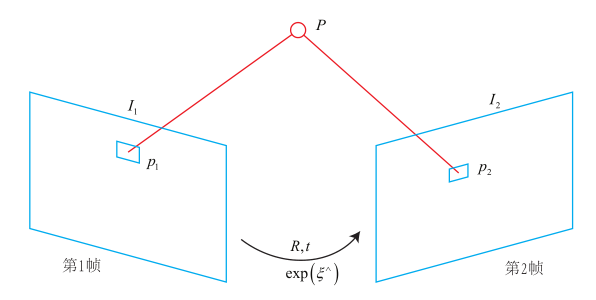
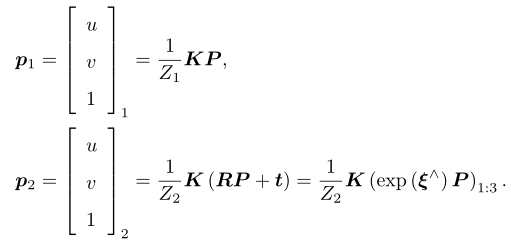
直接法的思路是根据当前相机的位姿估计值,来寻找(p_{2})的位置,误差项为光度误差
(e = I_{1}(p_{1}) - I_{2}(p_{2}))
考虑多个空间点P,那个整个相机位姿估计问题会变成:

主要问题是求误差e相对于位姿的导数关系。使用李代数的扰动模型,给(exp(xi))左乘一个小扰动(exp(delta xi))得:
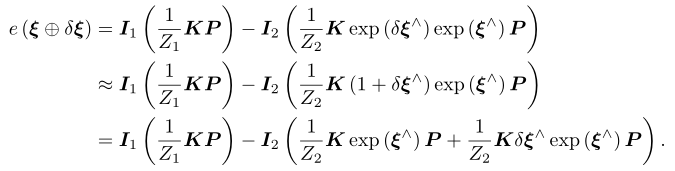
记:(q = delta xi^{Lambda} exp(xi^{Lambda}) P),
(u = frac{1}{Z_{2}}Kq)
q为P在扰动之后,位于第二个相机坐标系下的坐标,而u为它的像素坐标,利用一阶泰勒展开,有:

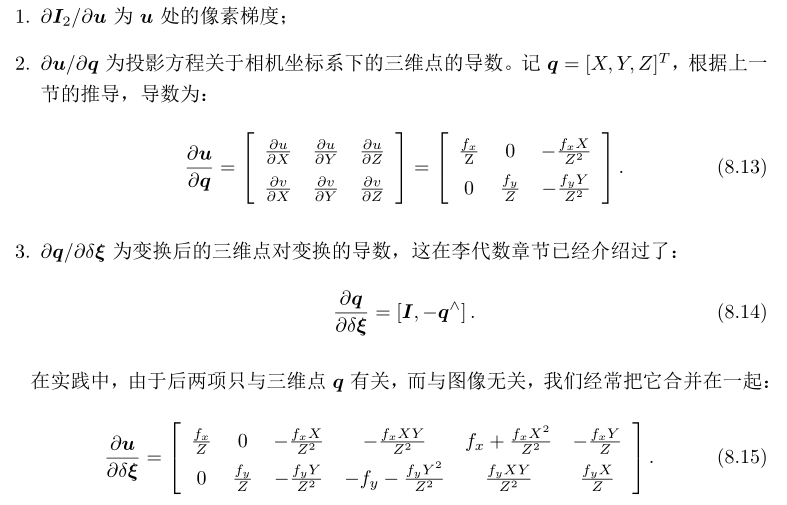
故误差相对于李代数的雅可比矩阵为:
2.直接法分类:
1.稀疏关键点:通常使用数百个至上千个关键点,像LK光流那样,这种稀疏直接法不必计算描述子,因此速度最快,但只能计算稀疏的重构。
2.半稠密直接法:考虑图像内带有梯度的像素点,舍弃像素梯度不明显的地方,重构一个半稠密结构。
3.稠密直接法:考虑所有像素点,需要GPU加速。
3.实践直接法:
1.单层稀疏直接法:
class JacobianAccumulator {
public:
JacobianAccumulator(
const cv::Mat &img1_,
const cv::Mat &img2_,
const VecVector2d &px_ref_,
const vector<double> depth_ref_,
Sophus::SE3d &T21_) :
img1(img1_), img2(img2_), px_ref(px_ref_), depth_ref(depth_ref_), T21(T21_) {
projection = VecVector2d(px_ref.size(), Eigen::Vector2d(0, 0));
}
/// accumulate jacobians in a range
void accumulate_jacobian(const cv::Range &range);
/// get hessian matrix
Matrix6d hessian() const { return H; }
/// get bias
Vector6d bias() const { return b; }
/// get total cost
double cost_func() const { return cost; }
/// get projected points
VecVector2d projected_points() const { return projection; }
/// reset h, b, cost to zero
void reset() {
H = Matrix6d::Zero();
b = Vector6d::Zero();
cost = 0;
}
private:
const cv::Mat &img1;
const cv::Mat &img2;
const VecVector2d &px_ref;
const vector<double> depth_ref;
Sophus::SE3d &T21;
VecVector2d projection; // projected points
std::mutex hessian_mutex;
Matrix6d H = Matrix6d::Zero();
Vector6d b = Vector6d::Zero();
double cost = 0;
};
void DirectPoseEstimationSingleLayer(
const cv::Mat &img1,
const cv::Mat &img2,
const VecVector2d &px_ref,
const vector<double> depth_ref,
Sophus::SE3d &T21) {
const int iterations = 10;
double cost = 0, lastCost = 0;
auto t1 = chrono::steady_clock::now();
JacobianAccumulator jaco_accu(img1, img2, px_ref, depth_ref, T21);
for (int iter = 0; iter < iterations; iter++) { //10次迭代次数
jaco_accu.reset();
cv::parallel_for_(cv::Range(0, px_ref.size()), //循环2000个点
std::bind(&JacobianAccumulator::accumulate_jacobian, &jaco_accu, std::placeholders::_1));
Matrix6d H = jaco_accu.hessian();
Vector6d b = jaco_accu.bias();
//10次迭代获取更新值
Vector6d update = H.ldlt().solve(b);
//更新姿态
T21 = Sophus::SE3d::exp(update) * T21;
cost = jaco_accu.cost_func();
if (std::isnan(update[0])) {
// sometimes occurred when we have a black or white patch and H is irreversible
cout << "update is nan" << endl;
break;
}
if (iter > 0 && cost > lastCost) {
cout << "cost increased: " << cost << ", " << lastCost << endl;
break;
}
if (update.norm() < 1e-3) {
// converge
break;
}
lastCost = cost;
cout << "iteration: " << iter << ", cost: " << cost << endl;
}
cout << "T21 =
" << T21.matrix() << endl;
auto t2 = chrono::steady_clock::now();
auto time_used = chrono::duration_cast<chrono::duration<double>>(t2 - t1);
cout << "direct method for single layer: " << time_used.count() << endl;
// plot the projected pixels here
cv::Mat img2_show;
cv::cvtColor(img2, img2_show, CV_GRAY2BGR);
VecVector2d projection = jaco_accu.projected_points();
for (size_t i = 0; i < px_ref.size(); ++i) {
auto p_ref = px_ref[i];
auto p_cur = projection[i];
if (p_cur[0] > 0 && p_cur[1] > 0) {
cv::circle(img2_show, cv::Point2f(p_cur[0], p_cur[1]), 2, cv::Scalar(0, 250, 0), 2);
cv::line(img2_show, cv::Point2f(p_ref[0], p_ref[1]), cv::Point2f(p_cur[0], p_cur[1]),
cv::Scalar(0, 250, 0));
}
}
cv::imshow("current", img2_show);
cv::waitKey();
}
void JacobianAccumulator::accumulate_jacobian(const cv::Range &range) {
// parameters
const int half_patch_size = 1; //区块大小
int cnt_good = 0;
Matrix6d hessian = Matrix6d::Zero();
Vector6d bias = Vector6d::Zero();
double cost_tmp = 0;
for (size_t i = range.start; i < range.end; i++) {
//第一张图的像素坐标转相机归一化坐标,乘深度转为相机3D点
Eigen::Vector3d point_ref =
depth_ref[i] * Eigen::Vector3d((px_ref[i][0] - cx) / fx, (px_ref[i][1] - cy) / fy, 1);
//将第一张图的点根据估计的位姿,转到第二张图的坐标系下
Eigen::Vector3d point_cur = T21 * point_ref;
if (point_cur[2] < 0) // depth invalid
continue;
//将相机坐标系转为像素坐标系
float u = fx * point_cur[0] / point_cur[2] + cx, v = fy * point_cur[1] / point_cur[2] + cy;
//去除边界点
if (u < half_patch_size || u > img2.cols - half_patch_size || v < half_patch_size ||
v > img2.rows - half_patch_size)
continue;
projection[i] = Eigen::Vector2d(u, v);
double X = point_cur[0], Y = point_cur[1], Z = point_cur[2],
//深度平方,用于雅可比矩阵的计算
Z2 = Z * Z, Z_inv = 1.0 / Z, Z2_inv = Z_inv * Z_inv;
cnt_good++;
//2个for循环主要是是为了计算图像梯度
for (int x = -half_patch_size; x <= half_patch_size; x++)
for (int y = -half_patch_size; y <= half_patch_size; y++) {
//重投影光度误差,
double error = GetPixelValue(img1, px_ref[i][0] + x, px_ref[i][1] + y) -
GetPixelValue(img2, u + x, v + y);
Matrix26d J_pixel_xi;
Eigen::Vector2d J_img_pixel;
//计算李代数雅可比矩阵
J_pixel_xi(0, 0) = fx * Z_inv;
J_pixel_xi(0, 1) = 0;
J_pixel_xi(0, 2) = -fx * X * Z2_inv;
J_pixel_xi(0, 3) = -fx * X * Y * Z2_inv;
J_pixel_xi(0, 4) = fx + fx * X * X * Z2_inv;
J_pixel_xi(0, 5) = -fx * Y * Z_inv;
J_pixel_xi(1, 0) = 0;
J_pixel_xi(1, 1) = fy * Z_inv;
J_pixel_xi(1, 2) = -fy * Y * Z2_inv;
J_pixel_xi(1, 3) = -fy - fy * Y * Y * Z2_inv;
J_pixel_xi(1, 4) = fy * X * Y * Z2_inv;
J_pixel_xi(1, 5) = fy * X * Z_inv;
//图像梯度
J_img_pixel = Eigen::Vector2d(
0.5 * (GetPixelValue(img2, u + 1 + x, v + y) - GetPixelValue(img2, u - 1 + x, v + y)),
0.5 * (GetPixelValue(img2, u + x, v + 1 + y) - GetPixelValue(img2, u + x, v - 1 + y))
);
// 计算误差对于李代数的雅可比矩阵
Vector6d J = -1.0 * (J_img_pixel.transpose() * J_pixel_xi).transpose();
hessian += J * J.transpose();
bias += -error * J;
cost_tmp += error * error;
}
}
if (cnt_good) {
// set hessian, bias and cost
unique_lock<mutex> lck(hessian_mutex); //多线程互斥量,自动释放
H += hessian;
b += bias;
cost += cost_tmp / cnt_good;
}
}
2.多层稀疏直接法:
类似于光流,把单层直接法扩展到金字塔式的多层直接法上,用Coarse-to-fine的过程计算相对运动。
void DirectPoseEstimationMultiLayer(
const cv::Mat &img1,
const cv::Mat &img2,
const VecVector2d &px_ref,
const vector<double> depth_ref,
Sophus::SE3d &T21) {
// parameters
int pyramids = 4;
double pyramid_scale = 0.5;
double scales[] = {1.0, 0.5, 0.25, 0.125};
// create pyramids
vector<cv::Mat> pyr1, pyr2; // image pyramids
for (int i = 0; i < pyramids; i++) {
if (i == 0) {
pyr1.push_back(img1);
pyr2.push_back(img2);
} else {
cv::Mat img1_pyr, img2_pyr;
cv::resize(pyr1[i - 1], img1_pyr,
cv::Size(pyr1[i - 1].cols * pyramid_scale, pyr1[i - 1].rows * pyramid_scale));
cv::resize(pyr2[i - 1], img2_pyr,
cv::Size(pyr2[i - 1].cols * pyramid_scale, pyr2[i - 1].rows * pyramid_scale));
pyr1.push_back(img1_pyr);
pyr2.push_back(img2_pyr);
}
}
double fxG = fx, fyG = fy, cxG = cx, cyG = cy; // backup the old values
for (int level = pyramids - 1; level >= 0; level--) {
VecVector2d px_ref_pyr; // set the keypoints in this pyramid level
for (auto &px: px_ref) {
px_ref_pyr.push_back(scales[level] * px);
}
// scale fx, fy, cx, cy in different pyramid levels
fx = fxG * scales[level];
fy = fyG * scales[level];
cx = cxG * scales[level];
cy = cyG * scales[level];
DirectPoseEstimationSingleLayer(pyr1[level], pyr2[level], px_ref_pyr, depth_ref, T21);
}
}