一:梯度消失
通常神经网络所用的激活函数是sigmoid函数,这个函数有个特点,就是能将负无穷到正无穷的数映射到0和1之间,并且对这个函数求导的结果是f′(x)=f(x)(1−f(x))。因此两个0到1之间的数相乘,得到的结果就会变得很小了。神经网络的反向传播是逐层对函数偏导相乘,因此当神经网络层数非常深的时候,最后一层产生的偏差就因为乘了很多的小于1的数而越来越小,最终就会变为0,从而导致层数比较浅的权重没有更新,这就是梯度消失。
两种情况下梯度消失经常出现,一是在深层网络中,二是采用了不合适的损失函数,比如sigmoid。梯度爆炸一般出现在深层网络和权值初始化值太大的情况下,下面分别从这两个角度分析梯度消失和爆炸的原因。
1.深层网络角度
比较简单的深层网络如下: 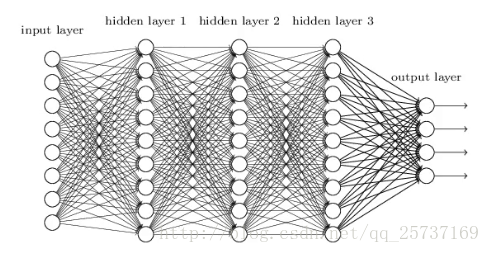
图中是一个四层的全连接网络,假设每一层网络激活后的输出为fi(x)fi(x),其中ii为第ii层, xx代表第ii层的输入,也就是第i−1i−1层的输出,ff是激活函数,那么,得出fi+1=f(fi∗wi+1+bi+1)fi+1=f(fi∗wi+1+bi+1),简单记为fi+1=f(fi∗wi+1)fi+1=f(fi∗wi+1)。
BP算法基于梯度下降策略,以目标的负梯度方向对参数进行调整,参数的更新为w←w+Δww←w+Δw,给定学习率αα,得出Δw=−α∂Loss∂wΔw=−α∂Loss∂w。如果要更新第二隐藏层的权值信息,根据链式求导法则,更新梯度信息:
Δw1=∂Loss∂w2=∂Loss∂f4∂f4∂f3∂f3∂f2∂f2∂w2Δw1=∂Loss∂w2=∂Loss∂f4∂f4∂f3∂f3∂f2∂f2∂w2,很容易看出来∂f2∂w2=f1∂f2∂w2=f1,即第二隐藏层的输入。
所以说,∂f4∂f3∂f4∂f3就是对激活函数进行求导,如果此部分大于1,那么层数增多的时候,最终的求出的梯度更新将以指数形式增加,即发生梯度爆炸,如果此部分小于1,那么随着层数增多,求出的梯度更新信息将会以指数形式衰减,即发生了梯度消失。如果说从数学上看不够直观的话,下面几个图可以很直观的说明深层网络的梯度问题11(图片内容来自参考文献1):
注:下图中的隐层标号和第一张全连接图隐层标号刚好相反。
图中的曲线表示权值更新的速度,对于下图两个隐层的网络来说,已经可以发现隐藏层2的权值更新速度要比隐藏层1更新的速度慢
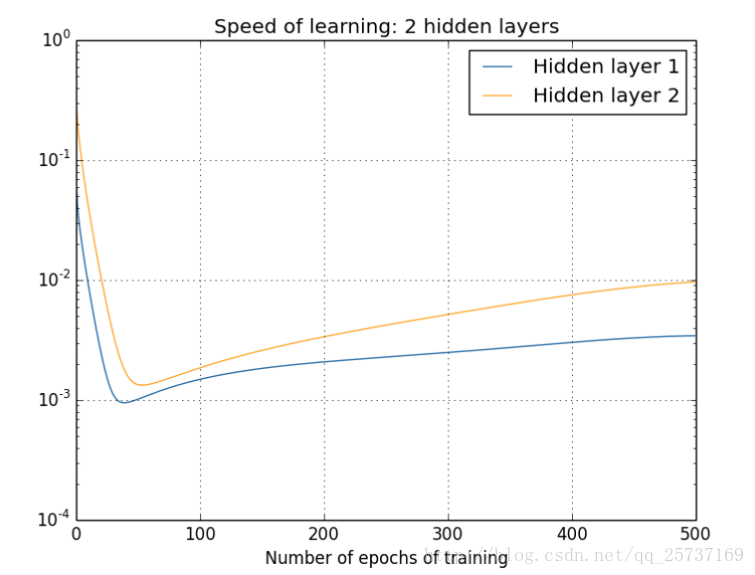
那么对于四个隐层的网络来说,就更明显了,第四隐藏层比第一隐藏层的更新速度慢了两个数量级:
- 1
- 2
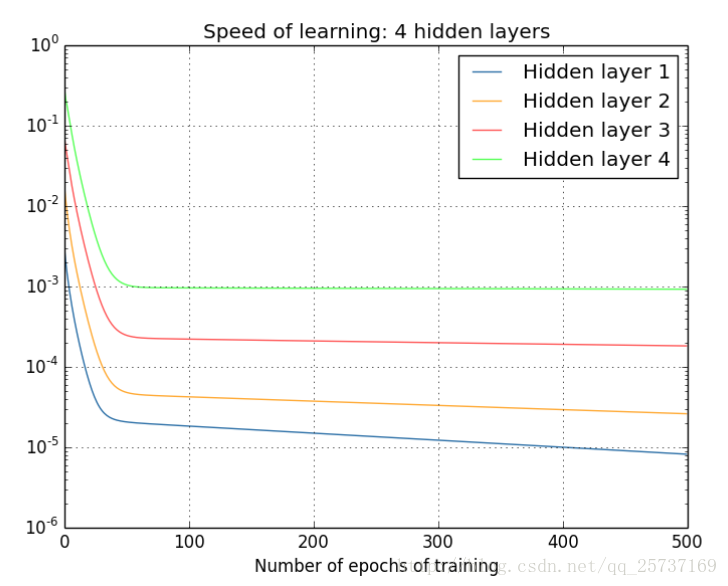
总结:从深层网络角度来讲,不同的层学习的速度差异很大,表现为网络中靠近输出的层学习的情况很好,靠近输入的层学习的很慢,有时甚至训练了很久,前几层的权值和刚开始随机初始化的值差不多。因此,梯度消失、爆炸,其根本原因在于反向传播训练法则,属于先天不足,另外多说一句,Hinton提出capsule的原因就是为了彻底抛弃反向传播,如果真能大范围普及,那真是一个革命。
2.激活函数角度
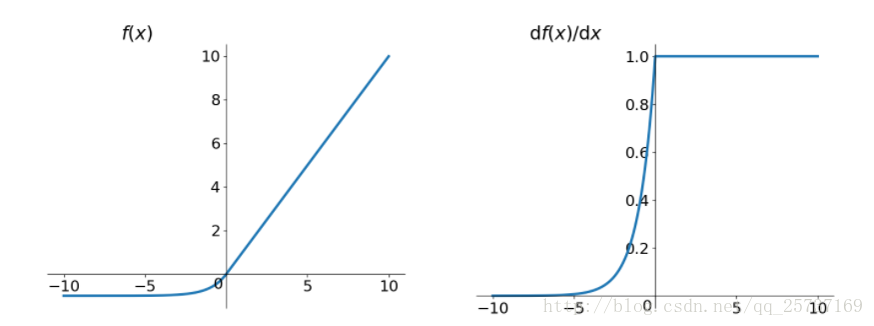
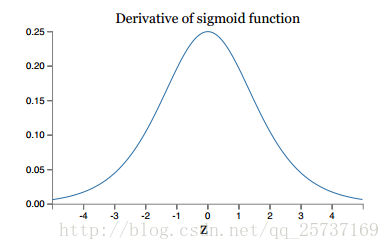
其实也注意到了,上文中提到计算权值更新信息的时候需要计算前层偏导信息,因此如果激活函数选择不合适,比如使用sigmoid,梯度消失就会很明显了,原因看下图,左图是sigmoid的损失函数图,右边是其倒数的图像,如果使用sigmoid作为损失函数,其梯度是不可能超过0.25的,这样经过链式求导之后,很容易发生梯度消失,sigmoid函数数学表达式为:sigmoid(x)=11+e−xsigmoid(x)=11+e−x 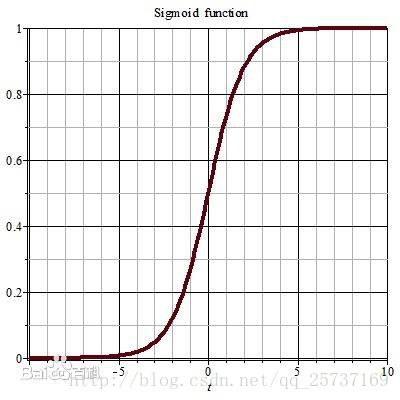
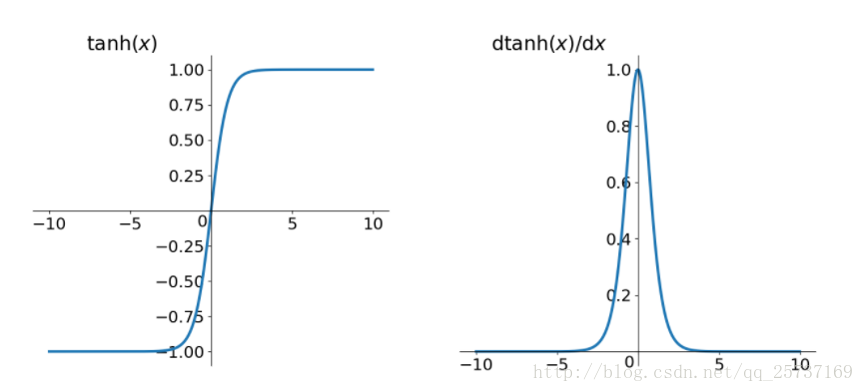
同理,tanh作为激活函数,它的导数图如下,可以看出,tanh比sigmoid要好一些,但是它的倒数仍然是小于1的。tanh数学表达为:
- 1
- 2
tanh(x)=ex−e−xex+e−xtanh(x)=ex−e−xex+e−x
二:梯度爆炸
梯度爆炸就是由于初始化权值过大,前面层会比后面层变化的更快,就会导致权值越来越大,梯度爆炸的现象就发生了。
在深层网络或循环神经网络中,误差梯度可在更新中累积,变成非常大的梯度,然后导致网络权重的大幅更新,并因此使网络变得不稳定。在极端情况下,权重的值变得非常大,以至于溢出,导致 NaN 值。
网络层之间的梯度(值大于 1.0)重复相乘导致的指数级增长会产生梯度爆炸。
如何确定是否出现梯度爆炸?
训练过程中出现梯度爆炸会伴随一些细微的信号,如:
-
模型无法从训练数据中获得更新(如低损失)。
-
模型不稳定,导致更新过程中的损失出现显著变化。
-
训练过程中,模型损失变成 NaN。
三:梯度消失、爆炸的解决方案
2.1 方案1-预训练加微调
此方法来自Hinton在2006年发表的一篇论文,Hinton为了解决梯度的问题,提出采取无监督逐层训练方法,其基本思想是每次训练一层隐节点,训练时将上一层隐节点的输出作为输入,而本层隐节点的输出作为下一层隐节点的输入,此过程就是逐层“预训练”(pre-training);在预训练完成后,再对整个网络进行“微调”(fine-tunning)。Hinton在训练深度信念网络(Deep Belief Networks中,使用了这个方法,在各层预训练完成后,再利用BP算法对整个网络进行训练。此思想相当于是先寻找局部最优,然后整合起来寻找全局最优,此方法有一定的好处,但是目前应用的不是很多了。
2.2 方案2-梯度剪切、正则
梯度剪切这个方案主要是针对梯度爆炸提出的,其思想是设置一个梯度剪切阈值,然后更新梯度的时候,如果梯度超过这个阈值,那么就将其强制限制在这个范围之内。这可以防止梯度爆炸。
注:在WGAN中也有梯度剪切限制操作,但是和这个是不一样的,WGAN限制梯度更新信息是为了保证lipchitz条件。 -
另外一种解决梯度爆炸的手段是采用权重正则化(weithts regularization)比较常见的是l1l1正则,和l2l2正则,在各个深度框架中都有相应的API可以使用正则化,比如在tensorflowtensorflow中,若搭建网络的时候已经设置了正则化参数,则调用以下代码可以直接计算出正则损失:
regularization_loss = tf.add_n(tf.losses.get_regularization_losses(scope='my_resnet_50')) -
如果没有设置初始化参数,也可以使用以下代码计算l2l2正则损失:
l2_loss = tf.add_n([tf.nn.l2_loss(var) for var in tf.trainable_variables() if 'weights' in var.name]) -
正则化是通过对网络权重做正则限制过拟合,仔细看正则项在损失函数的形式:
Loss=(y−WTx)2+α||W||2Loss=(y−WTx)2+α||W||2
其中,αα是指正则项系数,因此,如果发生梯度爆炸,权值的范数就会变的非常大,通过正则化项,可以部分限制梯度爆炸的发生。2.3 方案3-relu、leakrelu、elu等激活函数
Relu:思想也很简单,如果激活函数的导数为1,那么就不存在梯度消失爆炸的问题了,每层的网络都可以得到相同的更新速度,relu就这样应运而生。先看一下relu的数学表达式:
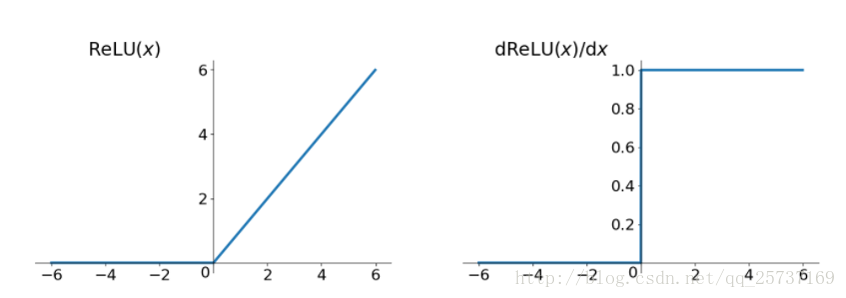
其函数图像:
从上图中,我们可以很容易看出,relu函数的导数在正数部分是恒等于1的,因此在深层网络中使用relu激活函数就不会导致梯度消失和爆炸的问题。relu的主要贡献在于:
-- 解决了梯度消失、爆炸的问题 -- 计算方便,计算速度快 -- 加速了网络的训练 -
同时也存在一些缺点:
-- 由于负数部分恒为0,会导致一些神经元无法激活(可通过设置小学习率部分解决) -- 输出不是以0为中心的 -
尽管relu也有缺点,但是仍然是目前使用最多的激活函数
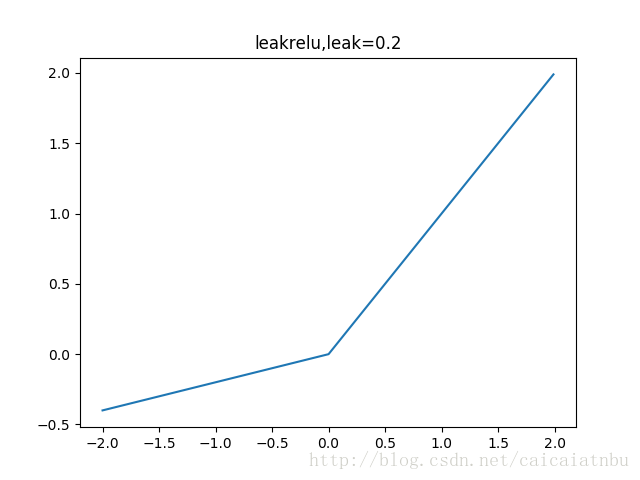
leakrelu
leakrelu就是为了解决relu的0区间带来的影响,其数学表达为:leakrelu=max(k∗x,0)leakrelu=max(k∗x,0)其中k是leak系数,一般选择0.01或者0.02,或者通过学习而来leakrelu解决了0区间带来的影响,而且包含了relu的所有优点
elu
elu激活函数也是为了解决relu的0区间带来的影响,其数学表达为:
其函数及其导数数学形式为:但是elu相对于leakrelu来说,计算要更耗时间一些
2.4 解决方案4-batchnorm
Batchnorm是深度学习发展以来提出的最重要的成果之一了,目前已经被广泛的应用到了各大网络中,具有加速网络收敛速度,提升训练稳定性的效果,Batchnorm本质上是解决反向传播过程中的梯度问题。batchnorm全名是batch normalization,简称BN,即批规范化,通过规范化操作将输出信号x规范化保证网络的稳定性。
具体的batchnorm原理非常复杂,在这里不做详细展开,此部分大概讲一下batchnorm解决梯度的问题上。具体来说就是反向传播中,经过每一层的梯度会乘以该层的权重,举个简单例子:
正向传播中f2=f1(wT∗x+b)f2=f1(wT∗x+b),那么反向传播中,∂f2∂x=∂f2∂f1w∂f2∂x=∂f2∂f1w,反向传播式子中有ww的存在,所以ww的大小影响了梯度的消失和爆炸,batchnorm就是通过对每一层的输出规范为均值和方差一致的方法,消除了ww带来的放大缩小的影响,进而解决梯度消失和爆炸的问题,或者可以理解为BN将输出从饱和区拉倒了非饱和区。
有关batch norm详细的内容可以参考我的另一篇博客:
http://blog.csdn.net/qq_25737169/article/details/790485162.5 解决方案5-残差结构
残差结构说起残差的话,不得不提这篇论文了:Deep Residual Learning for Image Recognition,关于这篇论文的解读,可以参考知乎链接:https://zhuanlan.zhihu.com/p/31852747这里只简单介绍残差如何解决梯度的问题。
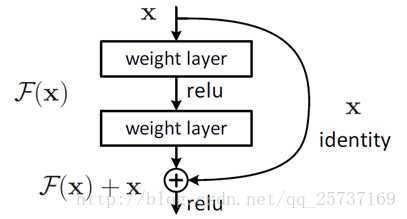
事实上,就是残差网络的出现导致了image net比赛的终结,自从残差提出后,几乎所有的深度网络都离不开残差的身影,相比较之前的几层,几十层的深度网络,在残差网络面前都不值一提,残差可以很轻松的构建几百层,一千多层的网络而不用担心梯度消失过快的问题,原因就在于残差的捷径(shortcut)部分,其中残差单元如下图所示:
相比较于以前网络的直来直去结构,残差中有很多这样的跨层连接结构,这样的结构在反向传播中具有很大的好处,见下式:
式子的第一个因子 ∂loss∂xL∂loss∂xL 表示的损失函数到达 L 的梯度,小括号中的1表明短路机制可以无损地传播梯度,而另外一项残差梯度则需要经过带有weights的层,梯度不是直接传递过来的。残差梯度不会那么巧全为-1,而且就算其比较小,有1的存在也不会导致梯度消失。所以残差学习会更容易。2.6 解决方案6-LSTM
LSTM全称是长短期记忆网络(long-short term memory networks),是不那么容易发生梯度消失的,主要原因在于LSTM内部复杂的“门”(gates),如下图,LSTM通过它内部的“门”可以接下来更新的时候“记住”前几次训练的”残留记忆“,因此,经常用于生成文本中。目前也有基于CNN的LSTM,感兴趣的可以尝试一下。

- 感谢博主的分享,以下本文原文出处:
- https://blog.csdn.net/qq_25737169/article/details/78847691
- https://www.cnblogs.com/DLlearning/p/8177273.html