平凡解: Ax=0中的零解,即x=0,称为平凡解
非平凡解: AX=0, 如果行列式|A|=0,那么A不可逆, 则X有非平凡解;否则,A可逆,那么只有解X=0,即是平凡解。
给定向量组 a1, a2, ···, am , x1a1+x2a2+···+xmam= 0
线性无关: x 只有零解
线性相关, x有非0 解
1. 特征向量

2. 对称矩阵 AT = A
3. 齐次方程 指简化后的方程中所有非零项的指数相等
4. 特征方程

5. 对角阵
5.1 对角化定理:
如果A 可以写为 A= PDP-1 ,P可逆且D为对角阵, 称 A可对角化,

已知A求 可逆矩阵P 和 对角阵D的方法
1.A-λE化简为 最简阶梯型矩阵
2. 令对角线值相乘 得 f(λ) = 0, 求得λ的三个解 λ1 λ2 λ3
3. 将每个λ代入 Ax = λx 求得x 再单位化就得到特征向量 u1 u2 u3 , (如果无法得到3个特征向量就说明无法对角化)
4 P = [ u1 u2 u3 ] 即可逆矩阵 , D = [ λ1 λ2 λ3 ]即为对角矩阵
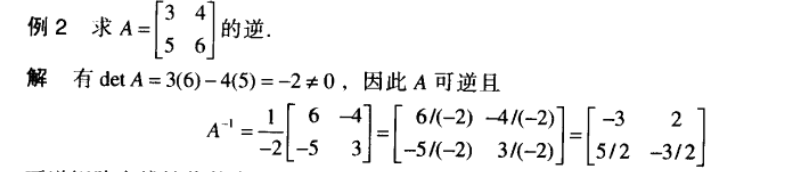
6 求矩阵的逆
7 阶梯性矩阵的 行列式等于 对角线上的数字乘积
8. 向量空间的基

A可以正交对角化 等价于 A是对称矩阵
11 二次型定义

12 主轴定理

13 正定矩阵和负定矩阵的判断方法 (特征值)
14 求z = xTAx 的最大值 (xTx=1) 就是求A的特征值最大值 再通过特征值求 u向量, u单位化之后就是我们的解。

15 如果x 和 u1 ....uk-1 等k-1个特征向量垂直, 那么最大值就是在x=uk取到 λk

16 怎么求特征方程
已知矩阵A 将A-λE 化简为阶梯型矩阵, 对角线相乘即特征方程f(x), f(x)=0 的解即为特征值
17
矩阵
17.1 矩阵的转置的基本性质
17.2 矩阵乘法性质

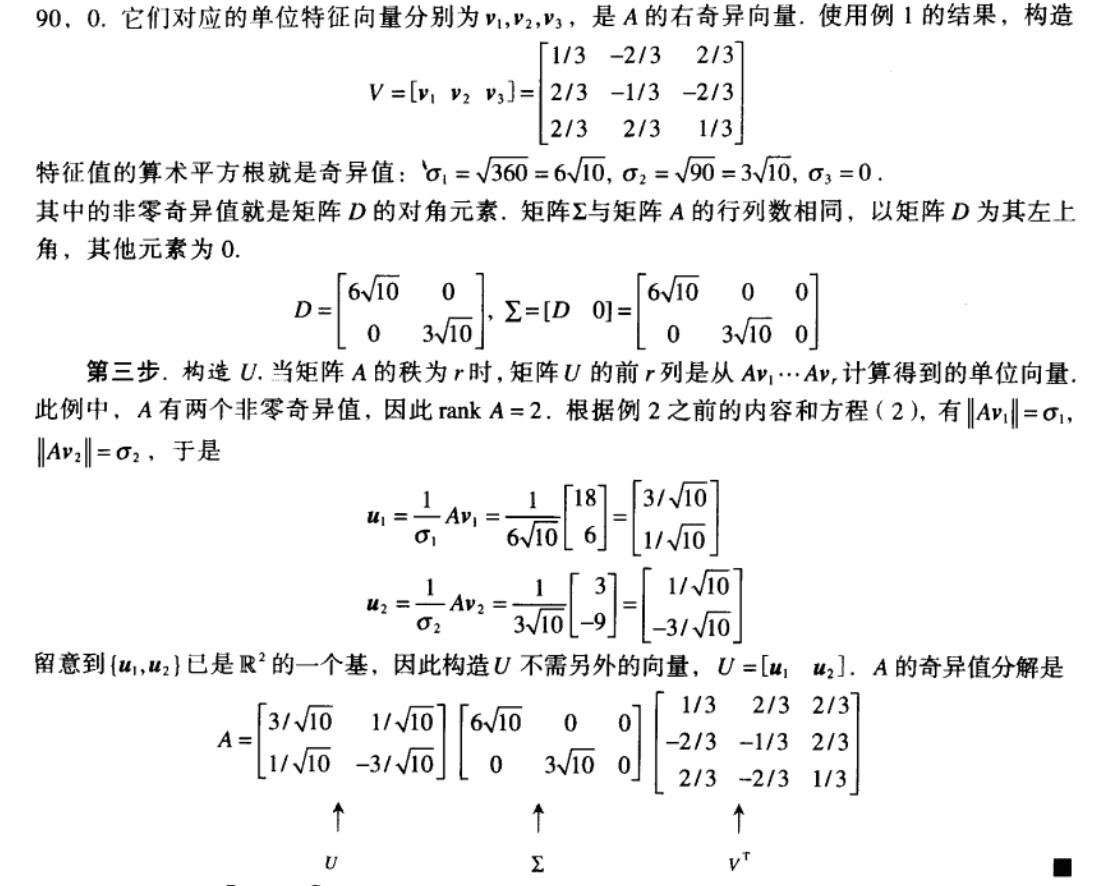
18 A的奇异值是啥
奇异值就是 ATA 中 特征值的平方根

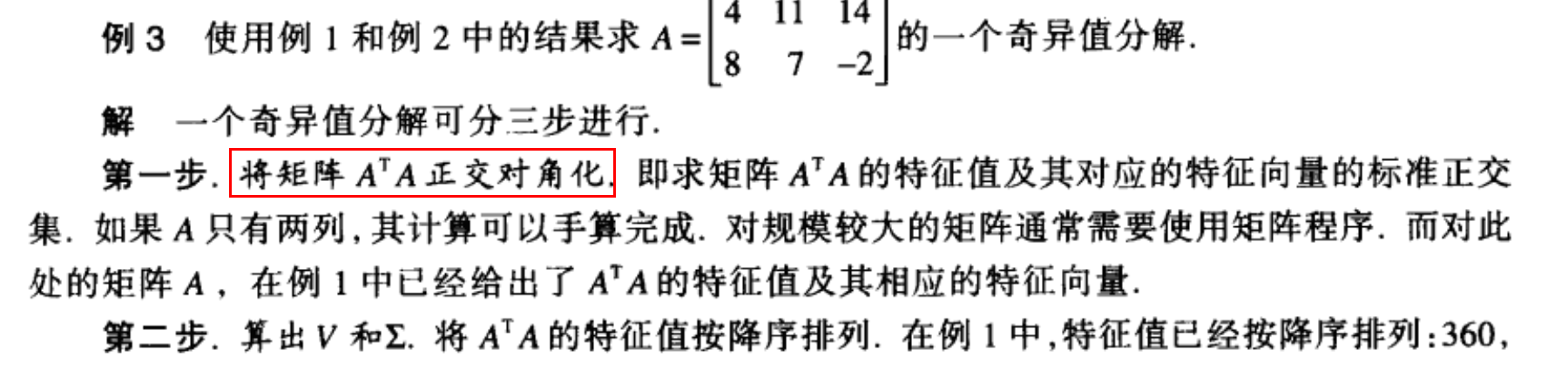
19 奇异值分解
20 协方差矩阵

协方差矩阵的含义 :
S
其中s13=0 说明 x1 和 x3 无关 tr(S)=10+8+32 = 50 表示S的迹 , 即 总方差
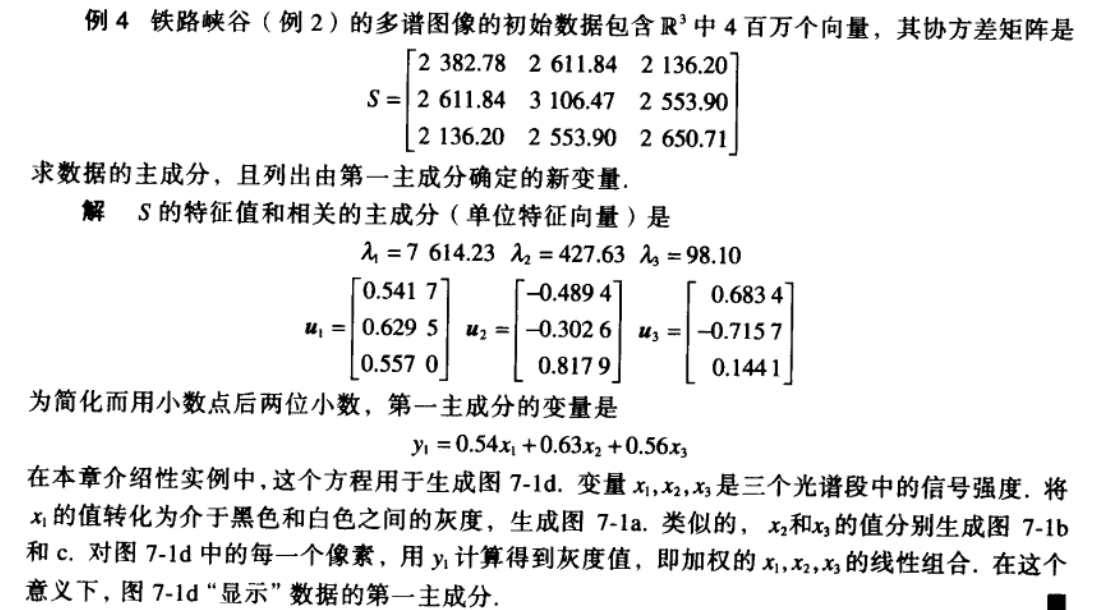
21 主成成分分析
22 矢量积

