基于opencv 霍夫变化后 直线融合:
int HoughLinesDB::linesProcess(const vector<Vec4f> &lineVector, double & disThreshold, vector<db::HoughLine> & finalLineVector) { vector<db::HoughLine> lineVector000; vector<db::HoughLine> lineVector001; for (size_t i = 0; i < lineVector.size(); i++) { db::HoughLine lineTemp; cv::Point p1, p2; p1.x = lineVector[i][0]; p1.y = lineVector[i][1]; p2.x = lineVector[i][2]; p2.y = lineVector[i][3]; pointsGetLines(p1, p2, lineTemp); lineVector000.push_back(lineTemp); } lineVector001 = lineVector000; vector<int> lineIndex; //踢出局 ///vector<db::HoughLine> finalLineVectorTemp; for (size_t i = 0; i < lineVector000.size(); i++) { if (isExistIndex(i, lineIndex)==1) continue; db::HoughLine lineTempA; lineTempA= lineVector000[i]; for (size_t j = i+1; j < lineVector001.size(); j++) { if (isExistIndex(j, lineIndex)==1) continue; int mergeMode; if (isMergeLine_2(lineTempA, lineVector001[j], disThreshold, mergeMode) == 1) { lineIndex.push_back(j); //踢出局 std::vector<double> kb; double ktemp; double btemp; ktemp = (lineTempA.k + lineVector001[j].k) / 2; btemp = (lineTempA.b + lineVector001[j].b) / 2; kb.push_back(ktemp); kb.push_back(btemp); //int getmax(double x1, double x2, double x3, double x4) cv::Point footPoint01, footPoint02, footPoint03, footPoint04; footPoint01 = getFootPoint(kb, lineTempA.firstPoint); footPoint02 = getFootPoint(kb, lineTempA.endPoint); footPoint03 = getFootPoint(kb, lineVector001[j].firstPoint); footPoint04 = getFootPoint(kb, lineVector001[j].endPoint); std::vector<cv::Point> footPointVector; footPointVector.push_back(footPoint01); footPointVector.push_back(footPoint02); footPointVector.push_back(footPoint03); footPointVector.push_back(footPoint04); int xmax = getmax(footPoint01.x, footPoint02.x, footPoint03.x, footPoint04.x); int xmin = getmin(footPoint01.x, footPoint02.x, footPoint03.x, footPoint04.x); lineTempA.firstPoint = footPointVector[xmax - 1]; lineTempA.endPoint = footPointVector[xmin - 1]; lineTempA.k = ktemp; lineTempA.b = btemp; } } finalLineVector.push_back(lineTempA); } return 0; }
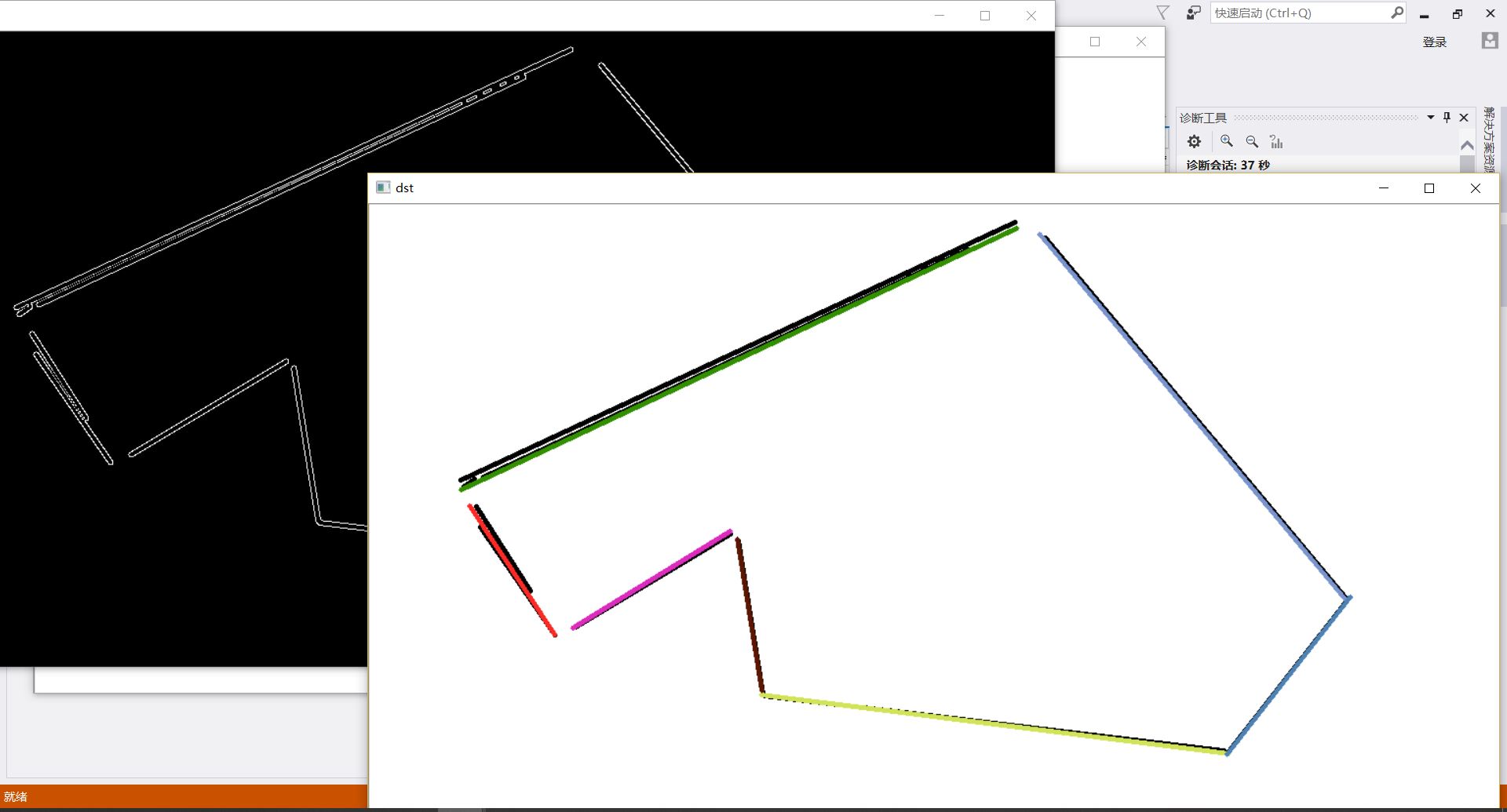
总结:利用“线段自优化”的思想。