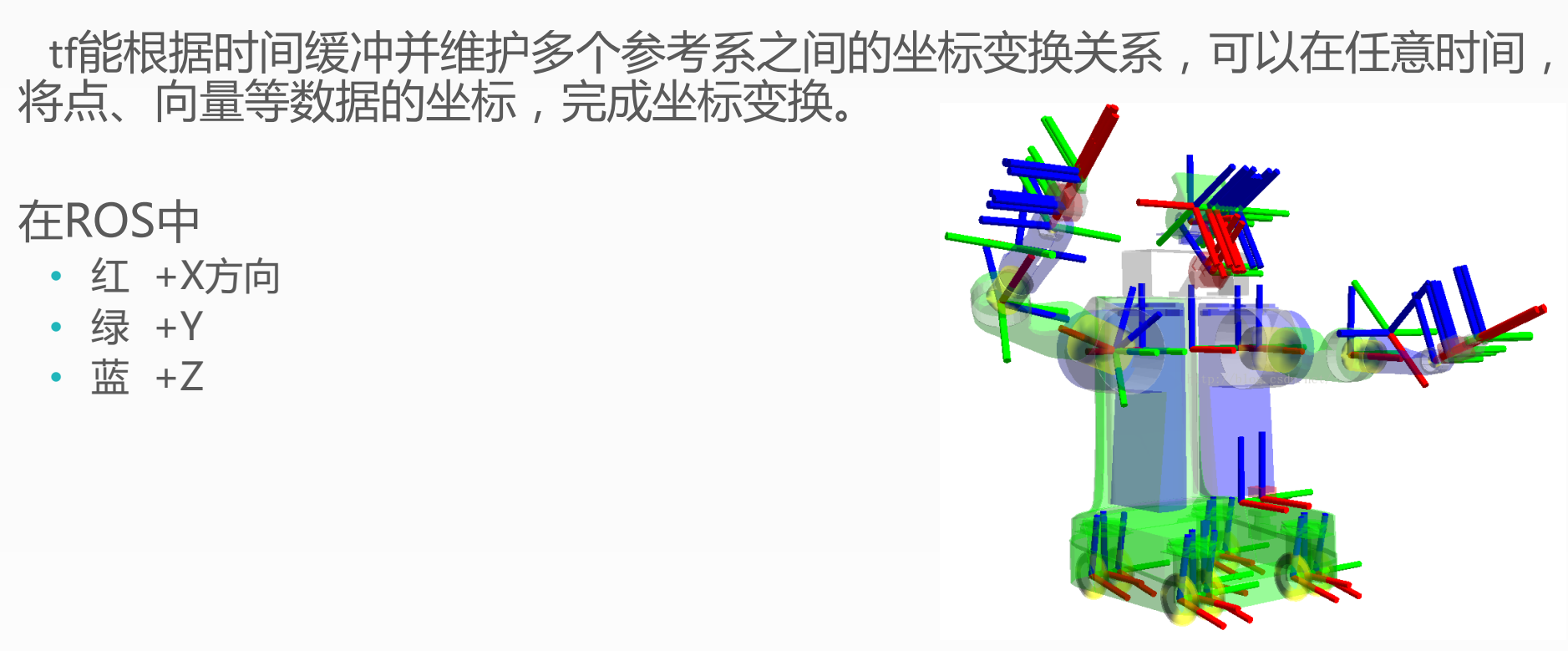
一、什么是TF
二、TF使用方法 
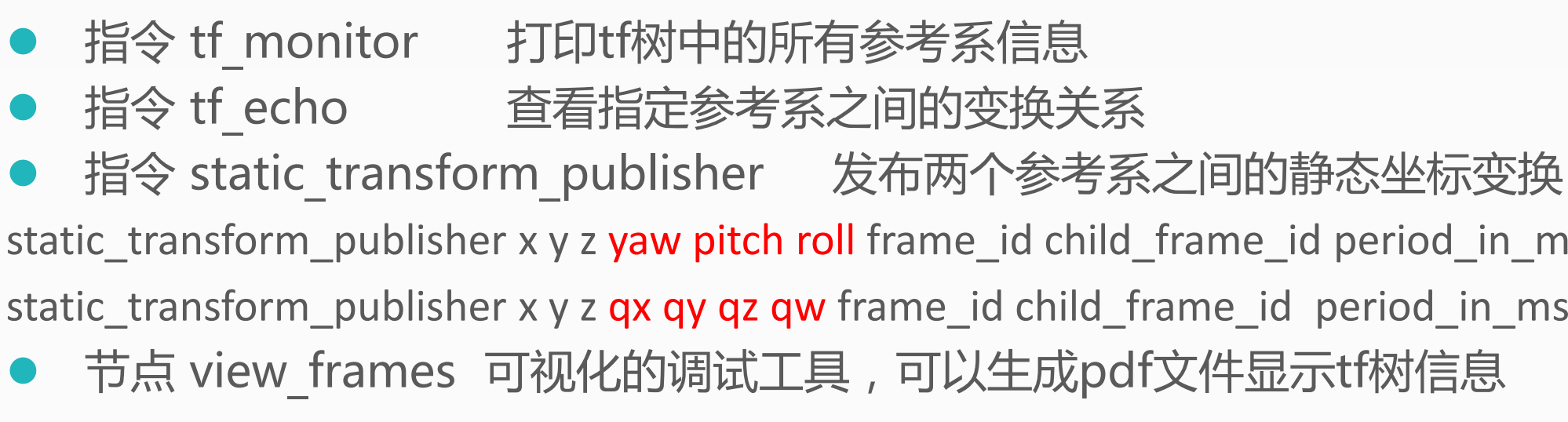
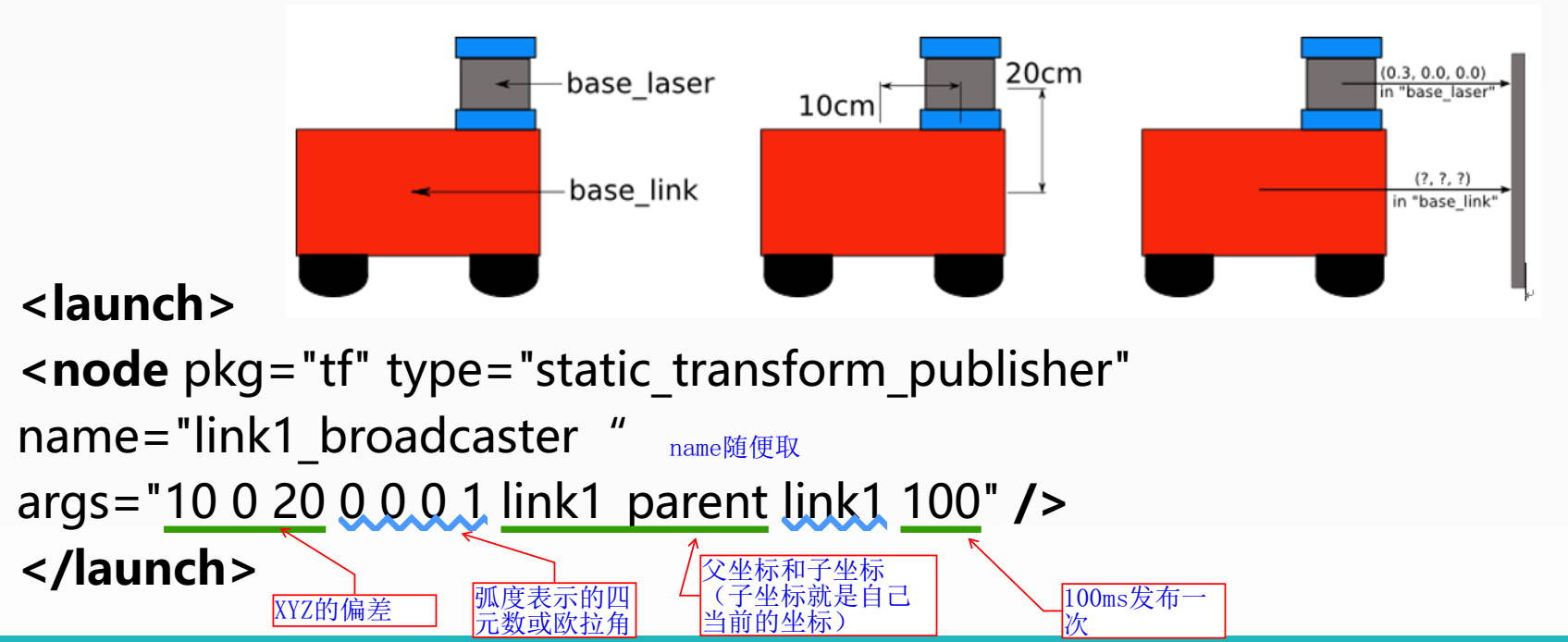
三、TF包内的指令工具
四、相关API

1、广播变换
发布坐标之间的坐标关系
#include <ros/ros.h> #include <tf/transform_broadcaster.h> int main(int argc, char** argv) { ros::init(argc, argv, "robot_tf_publisher"); ros::NodeHandle n; ros::Rate r(10); tf::TransformBroadcaster broadcaster; while(n.ok()){ //发布坐标变换 broadcaster.sendTransform(tf::StampedTransform(tf::Transform( tf::Quaternion(0, 0, 0, 1), //四元数 tf::Vector3(-0.25, 0.0, 0.0)), ros::Time::now(), "base_link", "laser")); r.sleep(); } }
2、使用变换
通过监听到上面发布的坐标变换,把坐标中的一个点变换到另一个坐标中的坐标
#include <ros/ros.h> #include <geometry_msgs/PointStamped.h> #include <tf/transform_listener.h> //我们将创建一个函数,给定一个TransformListener,在“base_laser”坐标系中取一点,并将其转换为“base_link”坐标系。 // 这个函数将作为在我们程序的main()中创建的ros::Timer的回调,并且每秒都会触发。 void transformPoint(const tf::TransformListener& listener){ //we'll create a point in the base_laser frame that we'd like to transform to the base_link frame geometry_msgs::PointStamped laser_point; laser_point.header.frame_id = "base_laser"; //we'll just use the most recent transform available for our simple example laser_point.header.stamp = ros::Time();//时间戳 //just an arbitrary point in space laser_point.point.x = 1.0; laser_point.point.y = 0.2; laser_point.point.z = 0.0; try{ geometry_msgs::PointStamped base_point; listener.transformPoint("base_link", laser_point, base_point);//坐标中的点的位置变换 ROS_INFO("base_laser: (%.2f, %.2f. %.2f) -----> base_link: (%.2f, %.2f, %.2f) at time %.2f", laser_point.point.x, laser_point.point.y, laser_point.point.z, base_point.point.x, base_point.point.y, base_point.point.z, base_point.header.stamp.toSec()); } catch(tf::TransformException& ex){ ROS_ERROR("Received an exception trying to transform a point from "base_laser" to "base_link": %s", ex.what()); } } int main(int argc, char** argv){ ros::init(argc, argv, "robot_tf_listener"); ros::NodeHandle n; //我们需要创建一个tf::TransformListener。一个TransformListener对象自动订阅了ROS变换消息主题和管理所有将在网络中广播的变换数据。 tf::TransformListener listener(ros::Duration(10)); //we'll transform a point once every second ros::Timer timer = n.createTimer(ros::Duration(1.0), boost::bind(&transformPoint, boost::ref(listener))); ros::spin(); }
wiki.ros.org/tf/Overview
http://wiki.ros.org/cn/tf/Tutorials
https://www.ncnynl.com/archives/201708/1881.html