YOLO 在卷积层之后使用了 DarkNet 来做特征检测。

然而,它并没有使用多尺度特征图来做独立的检测。相反,它将特征图部分平滑化,并将其和另一个较低分辨率的特征图拼接。例如,YOLO 将一个 28 × 28 × 512 的层重塑为 14 × 14 × 2048,然后将它和 14 × 14 ×1024 的特征图拼接。之后,YOLO 在新的 14 × 14 × 3072 层上应用卷积核进行预测。
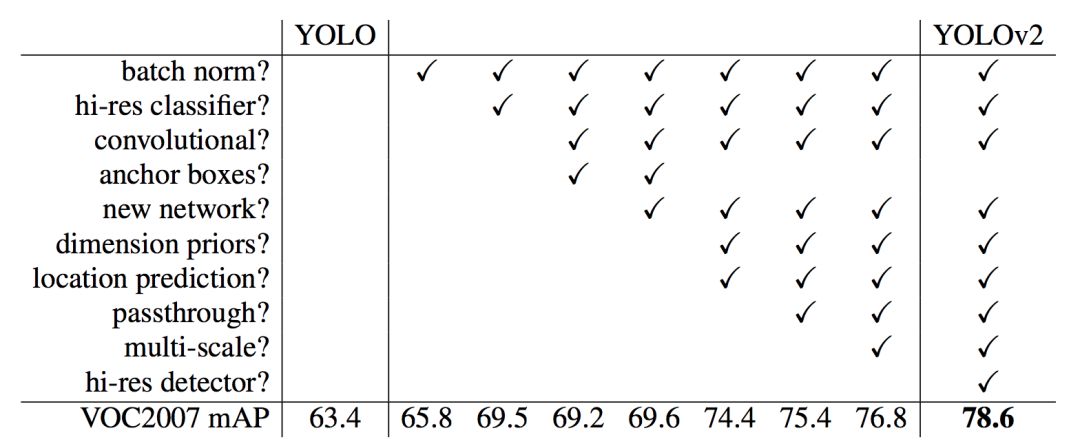
YOLO(v2)做出了很多实现上的改进,将 mAP 值从第一次发布时的 63.4 提高到了 78.6。YOLO9000 可以检测 9000 种不同类别的目标。
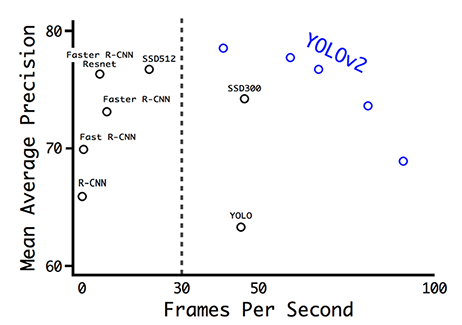
以下是 YOLO 论文中不同检测器的 mAP 和 FPS 对比。YOLOv2 可以处理不同分辨率的输入图像。低分辨率的图像可以得到更高的 FPS,但 mAP 值更低。
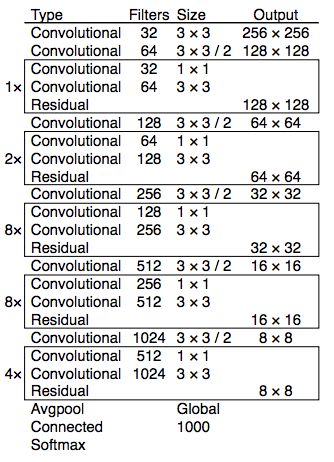
YOLOv3 使用了更加复杂的骨干网络来提取特征。DarkNet-53 主要由 3 × 3 和 1× 1 的卷积核以及类似 ResNet 中的跳过连接构成。相比 ResNet-152,DarkNet 有更低的 BFLOP(十亿次浮点数运算),但能以 2 倍的速度得到相同的分类准确率。
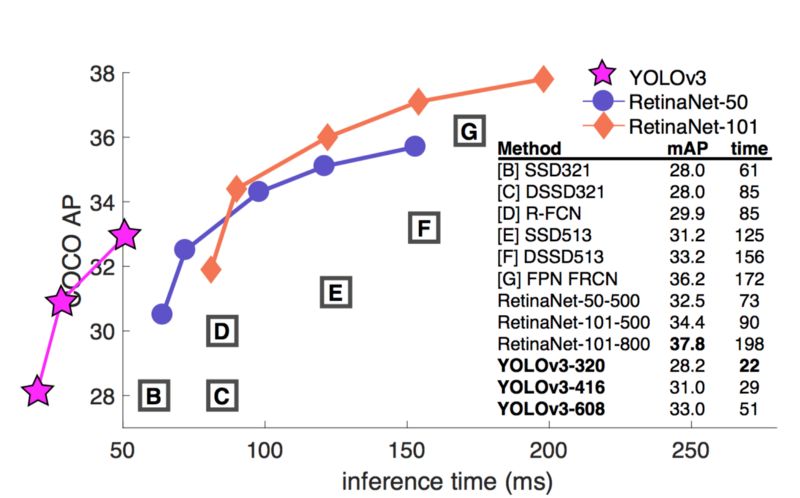
YOLOv3 还添加了特征金字塔,以更好地检测小目标。以下是不同检测器的准确率和速度的权衡。
特征金字塔网络(FPN)
检测不同尺度的目标很有挑战性,尤其是小目标的检测。特征金字塔网络(FPN)是一种旨在提高准确率和速度的特征提取器。它取代了检测器(如 Faster R-CNN)中的特征提取器,并生成更高质量的特征图金字塔。
数据流

FPN 由自下而上和自上而下路径组成。其中自下而上的路径是用于特征提取的常用卷积网络。空间分辨率自下而上地下降。当检测到更高层的结构,每层的语义值增加。
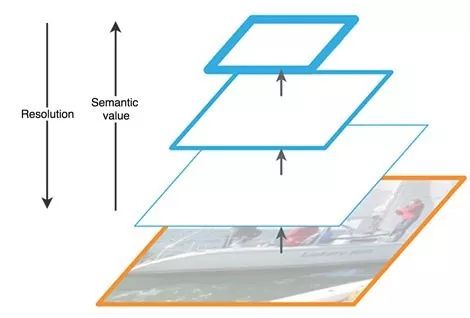
FPN 中的特征提取(编辑自原论文)
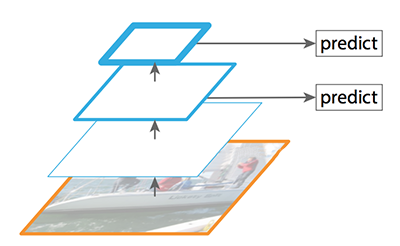
SSD 通过多个特征图完成检测。但是,最底层不会被选择执行目标检测。它们的分辨率高但是语义值不够,导致速度显著下降而不能被使用。SSD 只使用较上层执行目标检测,因此对于小的物体的检测性能较差。
FPN 提供了一条自上而下的路径,从语义丰富的层构建高分辨率的层。
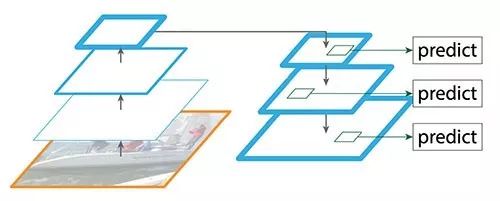
自上而下重建空间分辨率(编辑自原论文)
虽然该重建层的语义较强,但在经过所有的上采样和下采样之后,目标的位置不精确。在重建层和相应的特征图之间添加横向连接可以使位置侦测更加准确。
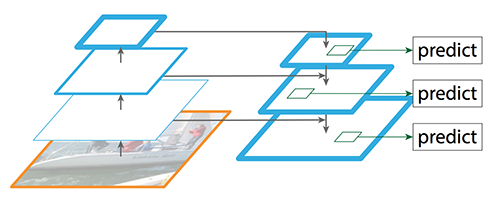
增加跳过连接(引自原论文)
下图详细说明了自下而上和自上而下的路径。其中 P2、P3、P4 和 P5 是用于目标检测的特征图金字塔。

文章出处:https://mp.weixin.qq.com/s/5zE78EU_NdV5ZeW5t1yV7A