前言
参考文档:
- 内核文档链接:https://www.kernel.org/doc/Documentation/
- 内核源码doc:Documentation/devicetree/bindings/pinctrl/pinctrl-bindings.txt
建议配合 GPIO 子系统使用。
建议,复制 原文链接观看,排版清晰,便于学习:
10. pinctrl子系统
pinctrl子系统 用于引脚的配置。如复用为那种引脚,电器特性等等。
gpio子系统 用于引脚的控制。如配置输出,输出高低电平等等。
当pinctrl子系统配置引脚为GPIO模式后,才能用gpio子系统控制引脚。
(pinctrl子系统可以把引脚配置为 GPIO模式,I2C模式* 等等*)
10.1 参考路径
pinctrl子系统内核文档:Documentation/devicetree/bindings/pinctrl/pinctrl-bindings.txt
pinctrl子系统源码路径:drivers/pinctrl
10.2 pinctrl子系统主要工作
pinctrl子系统 主要工作内容(内核实现):
- 获取设备树中用户配置的 PIN 信息。
- 根据获取到的信息,配置 PIN 的复用功能、电气特性。
以上工作内容都是内核实现的,用户不需要自己编写代码,只需要配置好设备树即可。
10.2 pinctrl子系统格式说明
pin controller 子节点格式是由芯片厂商自定义的,即每家芯片pin controller子节点格式都是不一样的。
各个厂商的 pinctrl 使用说明可以参考厂商提供的文档或去内核源码路径 Documentation/devicetree/bindings/pinctrl 目录下找到对应厂商的使用说明。
格式规范如:
imx6ull格式:
//client端:
@节点名字 {
pinctrl-names = "default";
pinctrl-0 = <&pinctrl_自定义名字A>;
status = "okay";
};
//pincontroller服务端
pinctrl_自定义名字A: 自定义名字B {
fsl,pins = <
引脚复用宏定义 PAD(引脚)属性, // 引脚 A
引脚复用宏定义 PAD(引脚)属性; // 引脚 B
>;
};
rk3288实例:
//client端
@uart0 {
pinctrl-names = "default";
pinctrl-0 = <&uart0_xfer &uart0_cts &uart0_rts>; //它使用三个节点来表示三组引脚。
status = "okay";
};
//pincontroller服务端
gpio4_uart0 {
// 引脚 A
uart0_xfer: uart0-xfer {
rockchip,pins = <UART0BT_SIN>, <UART0BT_SOUT>; //使用rockchip,pins来指定使用哪些引脚,就等效于groups
rockchip,pull = <VALUE_PULL_DISABLE>; //引脚的参数
rockchip,drive = <VALUE_DRV_DEFAULT>; //引脚的参数
};
// 引脚 B
uart0_cts: uart0-cts {
rockchip,pins = <UART0BT_CTSN>;
rockchip,pull = <VALUE_PULL_DISABLE>;
rockchip,drive = <VALUE_DRV_DEFAULT>;
};
// 引脚 C
uart0_rts: uart0-rts {
rockchip,pins = <UART0BT_RTSN>;
rockchip,pull = <VALUE_PULL_DISABLE>;
rockchip,drive = <VALUE_DRV_DEFAULT>;
};
uart0_rts_gpio: uart0-rts-gpio {
rockchip,pins = <FUNC_TO_GPIO(UART0BT_RTSN)>;
rockchip,drive = <VALUE_DRV_DEFAULT>;
};
};
10.3 概念
上面例子中说到 pin controller 和 client device,这两个节点说明都在文件 pinctrl-bindings.txt 中有说明。
pin controller:
- 服务端。
- 提供引脚的配置信息。
client device:
- 客户端。
- 声明需要使用哪个引脚。(使用来自客户端提供的引脚信息)
- 客户端其实就是需要使用该引脚的设备树节点。
/* For a client device requiring named states */
device {
pinctrl-names = "active", "idle"; // 该设备有两种状态,分别对应 pinctrl-0 和 pinctrl-1
pinctrl-0 = <&state_0_node_a>; // 第 0 个状态的名字为 active。对应的引脚在 pinctrl-0 里。
pinctrl-1 = <&state_1_node_a &state_1_node_b>; // 第 1 个状态的名字为 idle。对应的引脚在 pinctrl-1 里。
};
function:
- 功能。
groups:
- 使用 function 功能的 N 组引脚。
如:
state_0_node_a
{
uart0
{
function = "uart0";
groups = "u0rxtx", "u0rtscts";
};
};
10.4 实例分析
以 IMX6UL 为例子分析。
参考 NXP 提供的关于 pinctrl 文档或去 Documentation/devicetree/bindings/pinctrl 下找到文档 fsl,imx6ul-pinctrl.txt 和 fsl,imx-pinctrl.txt。
工具相应文档编写 pinctrl 配置信息。
根据文档得出以下几点关于 IMX6ULL pinctrl 子系统开发的要求:
- 节点 iomux 汇总所需引脚的配置信息。即是 pinctrl 子系统存储使用着 iomux 节点信息。
- 要在特定功能上工作的 pin ,应该在该特定功能节点下定义。
- 驱动程序可以使用客户节点的名称和服务节点的名称来描述引脚功能和组层次结构。
- 例如,Linux IMX pinctrl驱动程序以客户节点的名称作为函数名,服务节点的名称作为组名来创建映射表。
- 每个管脚配置节点都应该有一个phandle(即是pinctrl-0),设备可以通过引用该管脚配置节点的phandle 来设置管脚配置。
10.4.1 pin controller服务端
有些SoC 把 PIN 叫 PAD
格式有芯片厂商定义
引脚复用宏 & 引脚属性值:
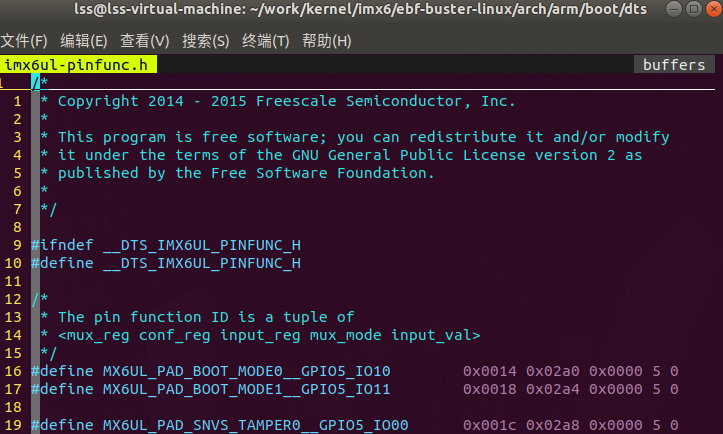
引脚复用宏定义 如 MX6UL_PAD_UART1_TX_DATA__UART1_DCE_TX 在 内核源码/arch/arm/boot/dts/imx6ul-pinfunc.h 文件中定义,由芯片厂商编写。
如图:
-
-
引脚复用宏 由5个参数组成,分别为:
- mux_reg:复用选择寄存器的偏移地址。
- conf_reg:引脚属性控制的偏移地址。
- input_reg:输入选择寄存器偏移地址。(用于输入的引脚)
- mux_mode:复用选择寄存器模式选择位的值。
- input_val:输入选择寄存器的值。
前面三个均为 寄存器地址偏移值,后面两个为对应要写入寄存器的值。
对应规则:
- mux_reg <-- mux_mode
- conf_reg <-- 引脚属性值 (宏后面的参数)
- 因为引脚属性配置比较多样灵活,所以由用户决定该值,便提出到宏外。
- input_reg <-- input_val
10.4.2 client device客户端
格式规范由设备树规定
客户端其实就是需要使用该引脚的设备树节点。
客户端必须至少有一个 pinctrl-0 状态。