第一次课堂作业,需要导入网格三维模型,对齐坐标系,然后在各个关节添加jiont,实现外观模型和运动仿真模型的分离。
1、首先导入模型。导入模型可能是一个整体模型(装配好的),也可能是单个(mesh)网格模型。如果是分开的网格模型,最好合并(group),然后将整个模型移动到合适的位置,对齐世界坐标系。
2、需要对有些连杆添加jiont(我觉得这很像电机,能够驱动其他连杆)。
最好一次性添加所有jiont,然后将jiont和其所在连杆(link)对齐。按住ctrl,先选择需要对齐的jiont,再选择连杆,之后点击object/items shift,实现坐标对齐(注意参考坐标系为世界坐标系)。之后角度对齐,点击object/items rotate->orientation->apply。
将所有的jiont对齐所对应的link,然后调整jiont的位置和角度,使其显示效果符合物理实际驱动情况。
3、建立与mesh外观所对应的物理模型。由于导入的外观mesh网格比较复杂,仿真结算比较慢,所以将外观模型与物理模型分开。分别添加简单的几何模型然后和外观模型几何中心对齐。
4、对于串联机械臂,调整scene hierarchy中的模型结构,由基座开始,首先基座的物理模型,之后将其外观模型和其上的jiont设为其孩子节点,将jiont所驱动的连杆(物理模型)设为jiont的child节点,根据如上,一层层连接,设置好整个scene hierarchy的所属驱动关系。一般为jiont驱动连杆。
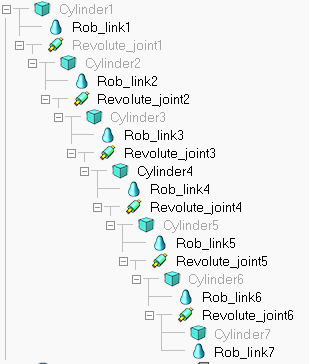
将物理模型设置为驱动他的jiont的child节点,将外观模型和其上的jiont设置为物理模型的child节点。
5、设置各模型的属性。外观模型设置外观可见,物理特性不可见,没有反馈和动力特性。物理模型设置为外观不可见,有物理性质(respondable,dynamic(mass质量))。
6、jiont属性设置。设置电机的驱动力矩/力。是否控制,关机运动速度。
设置完上面的步骤,整个机械臂就可以进行运动学控制了。