%% ------------------------------------------------------------------------
%% Output Info about this m-file
fprintf('
***********************************************************
');
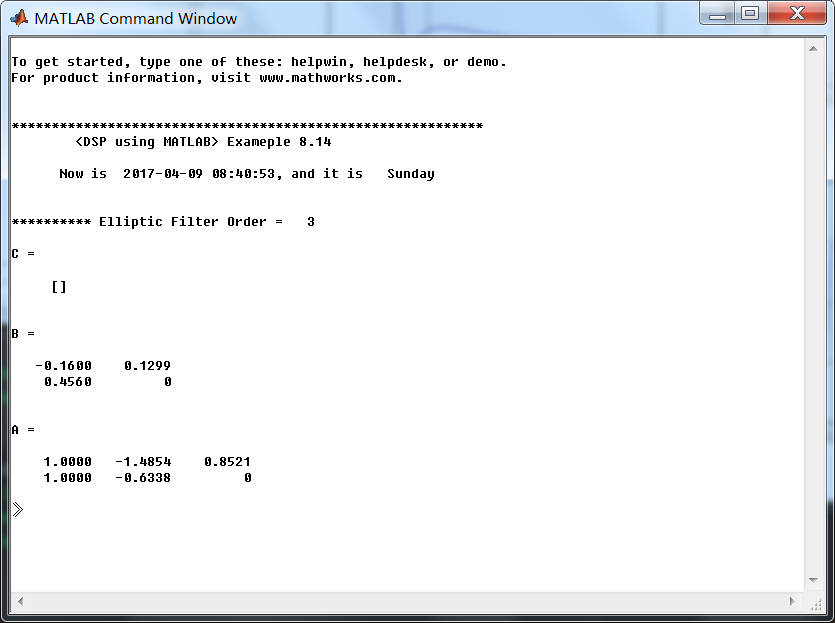
fprintf(' <DSP using MATLAB> Exameple 8.14
');
time_stamp = datestr(now, 31);
[wkd1, wkd2] = weekday(today, 'long');
fprintf(' Now is %20s, and it is %8s
', time_stamp, wkd2);
%% ------------------------------------------------------------------------
% Digital Filter Specifications:
wp = 0.2*pi; % digital passband freq in rad
ws = 0.3*pi; % digital stopband freq in rad
Rp = 1; % passband ripple in dB
As = 15; % stopband attenuation in dB
% Analog prototype specifications: Inverse Mapping for frequencies
T = 1; % set T = 1
OmegaP = wp/T; % prototype passband freq
OmegaS = ws/T; % prototype stopband freq
% Analog Elliptic Prototype Filter Calculation:
[cs, ds] = afd_elip(OmegaP, OmegaS, Rp, As);
% Impulse Invariance Transformation:
[b, a] = imp_invr(cs, ds, T); [C, B, A] = dir2par(b, a)
% Calculation of Frequency Response:
[db, mag, pha, grd, ww] = freqz_m(b, a);
%% -----------------------------------------------------------------
%% Plot
%% -----------------------------------------------------------------
figure('NumberTitle', 'off', 'Name', 'Exameple 8.14')
set(gcf,'Color','white');
M = 1; % Omega max
subplot(2,2,1); plot(ww/pi, mag); axis([0, M, 0, 1.2]); grid on;
xlabel(' frequency in pi units'); ylabel('|H|'); title('Magnitude Response');
set(gca, 'XTickMode', 'manual', 'XTick', [0, 0.2, 0.3, M]);
set(gca, 'YTickMode', 'manual', 'YTick', [0, 0.1778, 0.8913, 1]);
subplot(2,2,2); plot(ww/pi, pha/pi); axis([0, M, -1.1, 1.1]); grid on;
xlabel('frequency in pi nuits'); ylabel('radians in pi units'); title('Phase Response');
set(gca, 'XTickMode', 'manual', 'XTick', [0, 0.2, 0.3, M]);
set(gca, 'YTickMode', 'manual', 'YTick', [-1:1:1]);
subplot(2,2,3); plot(ww/pi, db); axis([0, M, -30, 10]); grid on;
xlabel('frequency in pi units'); ylabel('Decibels'); title('Magnitude in dB ');
set(gca, 'XTickMode', 'manual', 'XTick', [0, 0.2, 0.3, M]);
set(gca, 'YTickMode', 'manual', 'YTick', [-30, -15, -1, 0]);
subplot(2,2,4); plot(ww/pi, grd); axis([0, M, 0, 20]); grid on;
xlabel('frequency in pi units'); ylabel('Samples'); title('Group Delay');
set(gca, 'XTickMode', 'manual', 'XTick', [0, 0.2, 0.3, M]);
set(gca, 'YTickMode', 'manual', 'YTick', [0:5:20]);
运行结果:
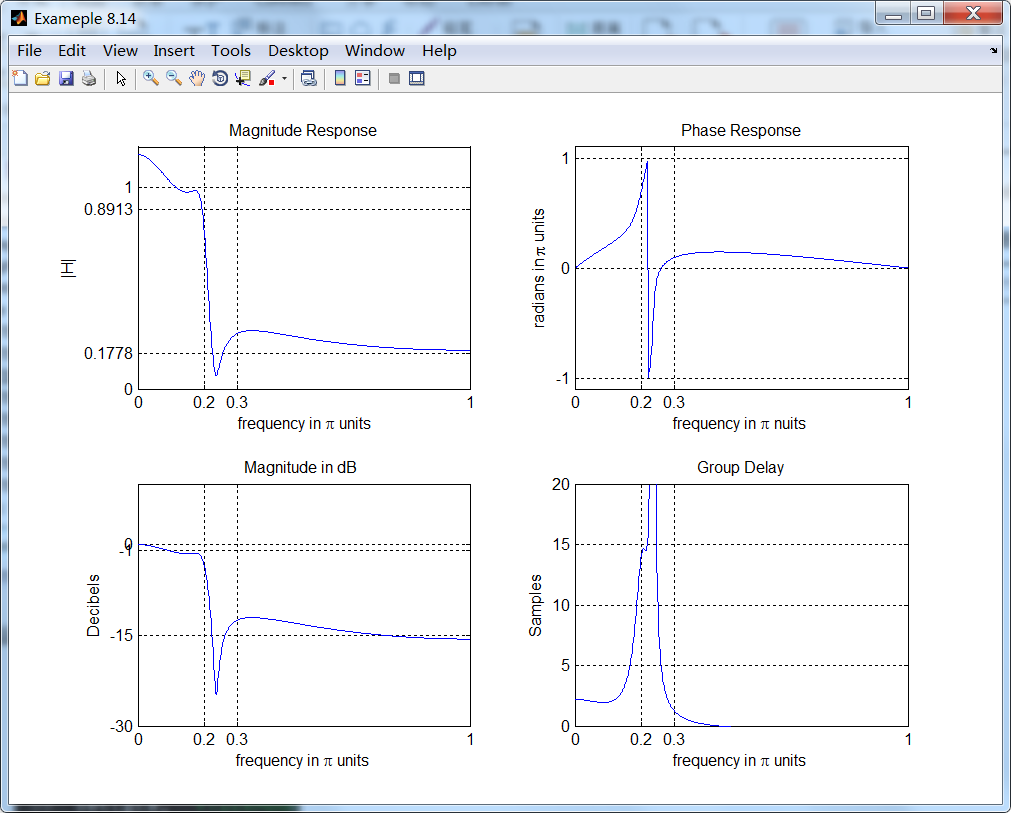
从图上看出,脉冲不变设计方法又失败了。
脉冲不变方法的优点是稳定的设计,频率Ω和ω是线性相关的。但是缺点是模拟频率响应中有一些假频,某些情况下假频是无法容忍的。
结论:该设计方法仅当模拟滤波器是带限到低通或带通的情况(阻带中没有振荡)。