Transform
| 属性 | 说明 |
|---|---|
| Matrix4x4 localToWorldMatrix: | 本地坐标->世界坐标的矩阵信息。 |
| Matrix4x4 worldToLocalMatrix: | 世界坐标->本地坐标的矩阵信息。 |
| 方法 | 说明 |
|---|---|
| Vector3 TransformDirection(Vector3 direction): | 本地坐标->世界坐标,不受位置和缩放影响(只旋转坐标方向)。 |
| Vector3 TransformPoint(Vector3 position): | 本地坐标->世界坐标,受位置和缩放影响。 |
| Vector3 TransformVector(Vector3 vector): | 本地坐标->世界坐标,不受位置影响,受缩放影响。 |
| 方法 | 说明 |
|---|---|
| Vector3 InverseTransformDirection(Vector3 direction): | 世界坐标->本地坐标,不受位置和缩放影响(只旋转坐标方向)。 |
| Vector3 InverseTransformPoint(Vector3 position): | 世界坐标->本地坐标,受位置和缩放影响。 |
| Vector3 InverseTransformVector(Vector3 vector): | 世界坐标->本地坐标,不受位置影响,受缩放影响。 |
transform.position=new Vector3(10,0,0);
transform.eulerAngles=new Vector3(0,90,0);
transform.localScale=new Vector3(0.5f,0,0.5f);
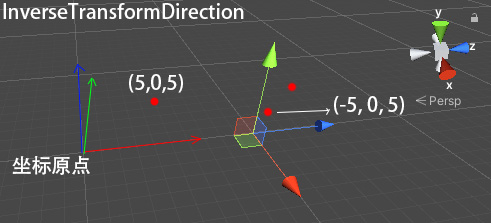
Vector3 relative=transform.InverseTransformDirection(new Vector3(5,0,5));//转换结果见下图A
Debug.Log(relative);//output: (-5, 0, 5)
relative=transform.InverseTransformPoint(new Vector3(5,0,5));//转换结果见下图B
Debug.Log(relative);//output:(-10, 0, -10)
relative=transform.InverseTransformVector(new Vector3(5,0,5));//转换结果见下图C
Debug.Log(relative);//output:(-10, 0, 10)
图A:
图B:

图C:

旋转向量
//将向量的方向转换为四元数
//x、y、z旋转角度都为0,就是Vector3.forward的方向
Quaternion qua0=new Quaternion();
Debug.Log(qua0.eulerAngles);//输出:(0.0, 0.0, 0.0)
//同上
Quaternion qua1=Quaternion.LookRotation(Vector3.forward);
Debug.Log(qua1.eulerAngles);//输出:(0.0, 0.0, 0.0)
//将向量Vector3.right的方向转换为四元数
Quaternion qua2=Quaternion.LookRotation(Vector3.right);
Debug.Log(qua2.eulerAngles);//输出: (0.0, 90.0, 0.0)
//向量(1,0,0)绕Y轴旋转90度。
Vector3 a=new Vector3(1,0,0);
Vector3 b=Quaternion.AngleAxis(90, Vector3.up)*a;
Debug.Log(b);//输出:(0.0, 0.0, -1.0)
//向量(1,1,0)旋转到Vector3.right的方向(左视图)
Vector3 e=new Vector3(1,1,0);
Vector3 f=Quaternion.LookRotation(Vector3.right)*e;
Debug.Log(f);//输出: (0.0, 1.0, -1.0)
//将一个向量旋转到Transform组件的旋转角度
Vector3 f=new Vector3(0,0,1);
f=transform.rotation*f;
Quaternion.LookRotation (Vector3 forward, Vector3 upwards= Vector3.up);
现在有两个对象,如下图:


梯子:旋转欧拉角度为x=0,y=90,z=22。
狗:旋转欧拉角度为x=0,y=0,z=0。
求狗爬上梯子时的旋转欧拉角?
var ladder=new GameObject();
ladder.transform.eulerAngles=new Vector3(0f,90f,22f);
Debug.Log(ladder.transform.up);//ouput:(0.0,0.9,0.4)
Debug.Log(ladder.transform.right);//ouput:(0.0,0.1,-0.9)
var rotation=Quaternion.LookRotation(ladder.transform.up,ladder.transform.right);
//dog.transform.rotation=rotation;
Debug.Log(rotation.eulerAngles);//output:(292,0.0,0.0)