功能:读取USB视频,鼠标点击点(x,y)保存在共享内存
发射端
/* 1包含文件 */
//1.1 系统 必选
#include<iostream>
#include<Windows.h>
//1.2 opencv 可选
#include <opencv2/opencv.hpp>
using namespace cv;
using namespace std;
/* 2自定数据区 */
//2.1 要存储的数据
typedef struct
{
int x;
int y;
/*int zx;
int zy;*/
int width;
int height;
int flag;
}TrackBox; //目标检测的上下顶点;
TrackBox BOX;
/*3 共享内存*/
//3.1内存变量
HANDLE hMapFile;
LPCTSTR pBuf;
TCHAR szName[] = TEXT("Local\FHY_SYSTEM_0"); //指向同一块共享内存的名字
#define FRAME_SIZE 1920*1080 // 要存的数据大小(图像)
#define BUF_SIZE FRAME_SIZE*10 //分配10倍大
#define BOX_DATA (char*)pBuf+FRAME_SIZE*0 //数据存储的起始位置
//3.2 初始化
int intShareroom() {
hMapFile = CreateFileMapping(
INVALID_HANDLE_VALUE, // use paging file
NULL, // default security
PAGE_READWRITE, // read/write access
0, // maximum object size (high-order DWORD)
BUF_SIZE, // maximum object size (low-order DWORD)
szName); // name of mapping object
if (hMapFile == NULL)
{
printf(TEXT("Could not create file mapping object (%d).
"),
GetLastError());
return 1;
}
pBuf = (LPTSTR)MapViewOfFile(hMapFile, // handle to map object
FILE_MAP_ALL_ACCESS, // read/write permission
0,
0,
BUF_SIZE);
if (pBuf == NULL)
{
printf(TEXT("Could not map view of file (%d).
"),
GetLastError());
CloseHandle(hMapFile);
return 1;
}
}
/* 4 测试 鼠标点击输出 x y 存入共享内存 */
//4.1 鼠标事件
void onMouse(int event, int x, int y, int flags, void* param)
{
//cout << "flag =" << flag << endl;
Mat *im = reinterpret_cast<Mat*>(param);
switch (event)
{
case CV_EVENT_LBUTTONDOWN: //鼠标左键按下响应:返回坐标和灰度
BOX.x = x;
BOX.y = y;
BOX.flag = flags;
cout << "at(" << BOX.x << "," << BOX.y << ")" << "flag =" << BOX.flag << endl;
//cout << "flag =" << BOX.flag << endl;
//memcpy(&BOX, BOX_DATA, sizeof(TrackBox));
memcpy(BOX_DATA, &BOX, sizeof(TrackBox));
//memcpy(&flag, TRANSFER_FLAG, sizeof(int));
//memcpy(&point, DECTION_BOX_DATA, sizeof(CvPoint));
break;
}
}
// 4.2 读取视频
int imge_test() {
// 构造一个VideoWriter
//VideoWriter video("test.avi", CV_FOURCC('M', 'J', 'P', 'G'), 25.0, Size(1920, 1080));
VideoCapture capture(0);
if (!capture.isOpened())
{
return -1;
}
Mat frame;
capture.set(CV_CAP_PROP_FRAME_WIDTH, 1920);
capture.set(CV_CAP_PROP_FRAME_HEIGHT, 1080);
bool stop = false;
while (1)
{
//flag = 0;
capture >> frame;
cvNamedWindow("当前视频", 0);
resize(frame, frame, Size(1920, 1080));
//Sleep(10);
cvSetMouseCallback("当前视频", onMouse, &frame);
imshow("当前视频", frame);
waitKey(1);
}
}
int main()
{ //3 共享内存初始化
intShareroom();
//4 图像鼠标点击测试
imge_test();
//3 共享内存释放
UnmapViewOfFile(pBuf); //释放;
CloseHandle(hMapFile);
return 0;
}
接收端

#include <windows.h>
#include<iostream>
using namespace std;
// 1.1 定义共享内存
#define FRAME_SIZE 1920*1080 // 1单个大小
#define BUF_SIZE FRAME_SIZE*10 // 2设置单个成倍数
#define recBOX_DATA (char*)pBuffer+FRAME_SIZE*0 // 3在共享内存中的存储的开始地址
// 1.2
TCHAR szName[] = TEXT("Local\FHY_SYSTEM_0"); //4指向同一块共享内存的名字
HANDLE hMapFile; //创建句柄
LPCTSTR pBuffer;
// 2 要发送的数据格式
typedef struct
{
int x;
int y;
int width;
int height;
int flag;
}TrackBox; //目标检测的上下顶点;
TrackBox recBOX;
// 3初始化
void initShareMemory()
{
hMapFile = CreateFileMapping(
INVALID_HANDLE_VALUE, // use paging file
NULL, // default security
PAGE_READWRITE, // read/write access
0, // maximum object size (high-order DWORD)
BUF_SIZE, // maximum object size (low-order DWORD)
szName); // name of mapping object
if (hMapFile == NULL)
{
cout << "Could not create file mapping object" << GetLastError() << endl;
}
pBuffer = (LPTSTR)MapViewOfFile(hMapFile, // handle to map object
FILE_MAP_ALL_ACCESS, // read/write permission
0,
0,
BUF_SIZE);
if (pBuffer == NULL)
{
printf("Could not map view of file (%d).
",
GetLastError());
}
}
void main() {
initShareMemory();
while (true)
{
// 4 主函数中 使用
memcpy(&recBOX, recBOX_DATA, sizeof(TrackBox));// 取共享内存值
int itarget_x, itarget_y, itarget_h, itarget_w;
if (recBOX.flag != 0) // 标志位判断数据是否有效
{
itarget_x = recBOX.x;// 中心
itarget_y = recBOX.y;
itarget_h = recBOX.height;
itarget_w = recBOX.width;
//qDebug("target_x:%d target_y:%d", recBOX.x, recBOX.y);
}
else {
itarget_x = 1920 / 2;// 中心
itarget_y = 1080 / 2;
//qDebug("target_x:%d target_y:%d", itarget_x, itarget_y);
}
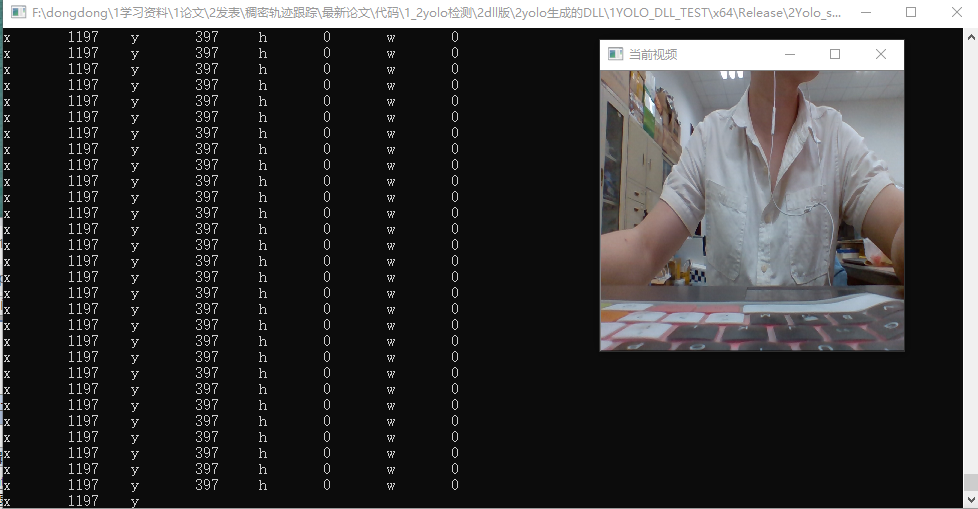
cout << "x " << itarget_x << " y " << itarget_y << " h " << itarget_h << " w " << itarget_w << endl;
}
}
封装成类
类定义
ShareMemray.h
#pragma once
#ifndef ShareMemray
#define ShareMemray
#include<iostream>
#include<Windows.h>
#include <opencv2/opencv.hpp>
using namespace cv;
using namespace std;
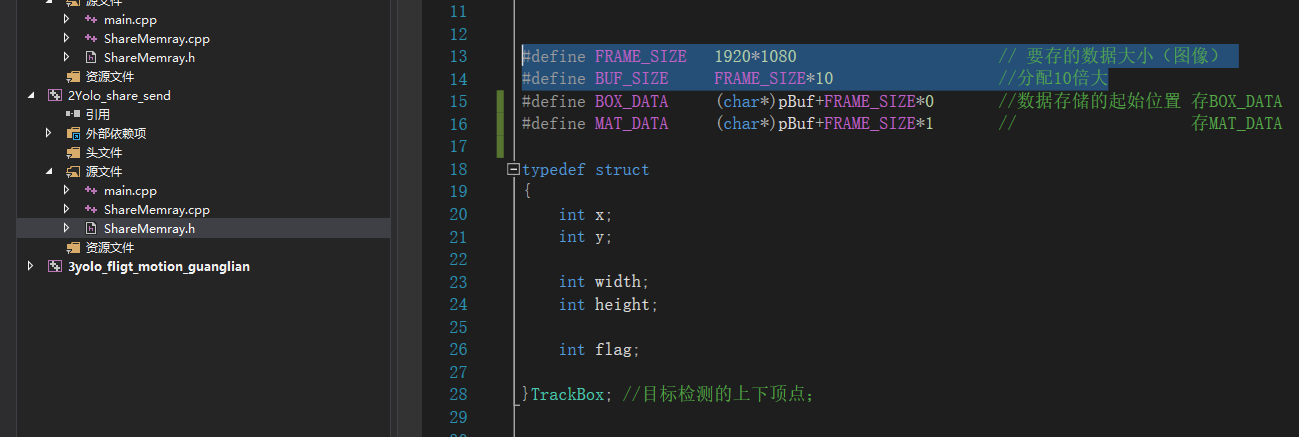
#define FRAME_SIZE 1920*1080 // 要存的数据大小(图像)
#define BUF_SIZE FRAME_SIZE*10 //分配10倍大
#define BOX_DATA (char*)pBuf+FRAME_SIZE*0 //数据存储的起始位置 存BOX_DATA pBuf+FRAME_SIZE*0 - pBuf+FRAME_SIZE*0+sizeof(TrackBox)
#define MAT_DATA (char*)pBuf+FRAME_SIZE*1 // 存MAT_DATA pBuf+FRAME_SIZE*1 - pBuf+FRAME_SIZE*1+sizeof(Mat)
typedef struct
{
int x;
int y;
int width;
int height;
int flag;
}TrackBox; //目标检测的上下顶点;
class SHAREDMEMORY {
private:
TrackBox BOX;
HANDLE hMapFile;
LPCTSTR pBuf;
TCHAR szName[30] = TEXT("Local\FHY_SYSTEM_0"); //指向同一块共享内存的名字
public:
//1 初始化
int intShareroom();
void SendBox(TrackBox BOX);
void RecBox(TrackBox BOX);
void stop();
};
#endif //SHAREDMEMORY_HPP
文件定义
ShareMemray.cpp
#include "ShareMemray.h"
//3.2 初始化
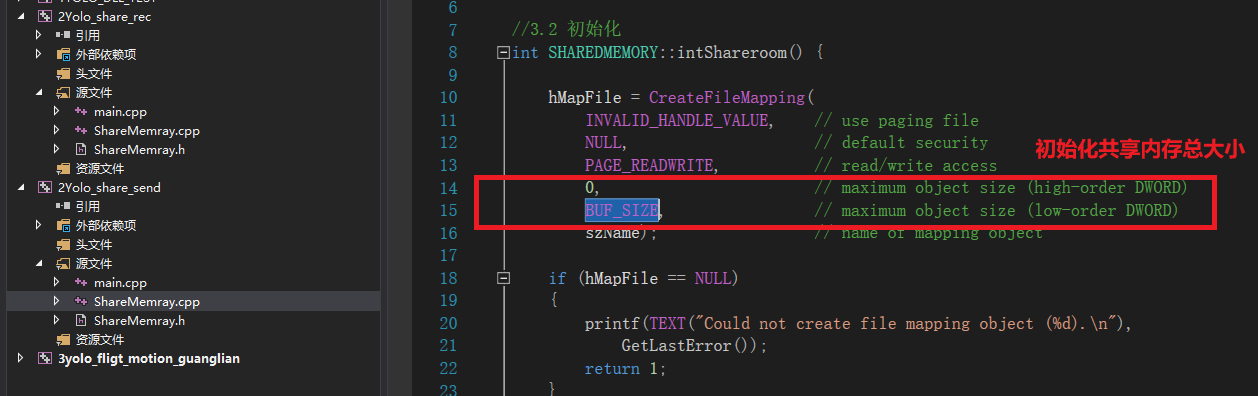
int SHAREDMEMORY::intShareroom() {
hMapFile = CreateFileMapping(
INVALID_HANDLE_VALUE, // use paging file
NULL, // default security
PAGE_READWRITE, // read/write access
0, // maximum object size (high-order DWORD)
BUF_SIZE, // maximum object size (low-order DWORD)
szName); // name of mapping object
if (hMapFile == NULL)
{
printf(TEXT("Could not create file mapping object (%d).
"),
GetLastError());
return 1;
}
pBuf = (LPTSTR)MapViewOfFile(hMapFile, // handle to map object
FILE_MAP_ALL_ACCESS, // read/write permission
0,
0,
BUF_SIZE);
if (pBuf == NULL)
{
printf(TEXT("Could not map view of file (%d).
"),
GetLastError());
CloseHandle(hMapFile);
return 1;
}
}
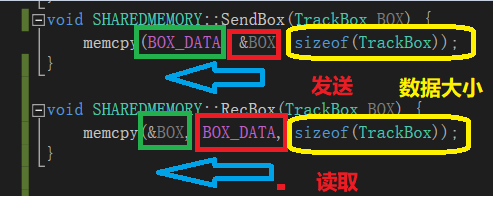
void SHAREDMEMORY::SendBox(TrackBox BOX) {
memcpy(BOX_DATA, &BOX, sizeof(TrackBox));
}
void SHAREDMEMORY::RecBox(TrackBox BOX) {
memcpy(&BOX, BOX_DATA, sizeof(TrackBox));
}
void SHAREDMEMORY::stop() {
UnmapViewOfFile(pBuf); //释放;
CloseHandle(hMapFile);
}
发送端

#pragma once
#ifndef MAIN
#define MAIN
/* 1包含文件 */
//1.1 系统 必选
#include<iostream>
#include<Windows.h>
#include "../Include/ShareMemray.h"
//1.2 opencv 可选
#include <opencv2/opencv.hpp>
using namespace cv;
using namespace std;
TrackBox BOX1;
/* 4 测试 鼠标点击输出 x y 存入共享内存 */
//4.1 鼠标事件
void onMouse(int event, int x, int y, int flags, void* param)
{
//cout << "flag =" << flag << endl;
Mat *im = reinterpret_cast<Mat*>(param);
switch (event)
{
case CV_EVENT_LBUTTONDOWN: //鼠标左键按下响应:返回坐标和灰度
BOX1.x = x;
BOX1.y = y;
BOX1.flag = flags;
cout << "at(" << BOX1.x << "," << BOX1.y << ")" << "flag =" << BOX1.flag << endl;
break;
}
}
// 4.2 读取视频
int imge_test(SHAREDMEMORY sharesend) {
// 构造一个VideoWriter
//VideoWriter video("test.avi", CV_FOURCC('M', 'J', 'P', 'G'), 25.0, Size(1920, 1080));
VideoCapture capture(0);
if (!capture.isOpened())
{
return -1;
}
Mat frame;
capture.set(CV_CAP_PROP_FRAME_WIDTH, 1920);
capture.set(CV_CAP_PROP_FRAME_HEIGHT, 1080);
bool stop = false;
while (1)
{
//flag = 0;
capture >> frame;
cvNamedWindow("当前视频", 0);
resize(frame, frame, Size(1920, 1080));
//Sleep(10);
cvSetMouseCallback("当前视频", onMouse, &frame);
imshow("当前视频", frame);
waitKey(1);
if (BOX1.flag == 1) {
sharesend.SendBox(BOX1);
BOX1.flag = 0;
}
}
}
int main()
{
//共享内存初始化
SHAREDMEMORY sharesend;
sharesend.intShareroom();
//共享内存发送信息
imge_test(sharesend);
//共享内存发送消息
sharesend.stop();
return 0;
}
#endif
接收端
#include <windows.h>
#include<iostream>
#include "../Include/ShareMemray.h"
using namespace std;
TrackBox recBOX;
void main() {
SHAREDMEMORY sharerec;
sharerec.intShareroom();
while (true)
{
sharerec.RecBox(recBOX);
int itarget_x, itarget_y, itarget_h, itarget_w;
if (recBOX.flag != 0) // 标志位判断数据是否有效
{
itarget_x = recBOX.x;// 中心
itarget_y = recBOX.y;
itarget_h = recBOX.height;
itarget_w = recBOX.width;
//qDebug("target_x:%d target_y:%d", recBOX.x, recBOX.y);
}
else {
itarget_x = 1920 / 2;// 中心
itarget_y = 1080 / 2;
//qDebug("target_x:%d target_y:%d", itarget_x, itarget_y);
}
cout << "x " << itarget_x << " y " << itarget_y << " h " << itarget_h << " w " << itarget_w << endl;
}
sharerec.stop();
}
如何发送一个新的自定义结构体
1在共享内存头文件构造这个结构体
typedef struct
{
int x;
int y;
int width;
int height;
int flag;
}TrackBox; //目标检测的上下顶点;
2 在发送类里面加入这个结构体声明
3 确定在开辟的贡献内存里,分哪一块用来存
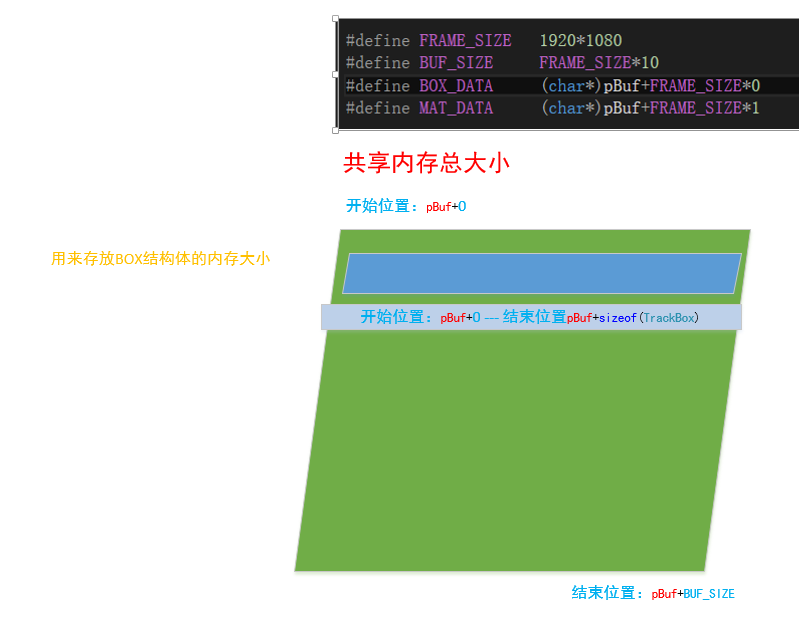
3-1 确认共享内存总的区间,足以存下
总空间名字
总空间大小
3-2 在我我们开辟的共享内存里,分那一块用来存

4 实际存入