在前面的一节中,我们已经使用arduino创建了一个publisher节点,接下来将会用arduino来创建一个subscriber,接收电脑传去的信息并做出相应的反应。
1启动Arduino
将arduino开发板连接到电脑的usb口,在arduino IDE中进行设置。
选择Tools->Board,选择你所使用的arduino开发板的类型,所使用的arduino开发板是arduino pro min。
设置好开发板之后,继续选择Tools->Serial Port->/dev/ttyUSB0。
2编译程序
选择File->Examples->ros_lib->Blink,就可以打开一个示例程序,代码如下:
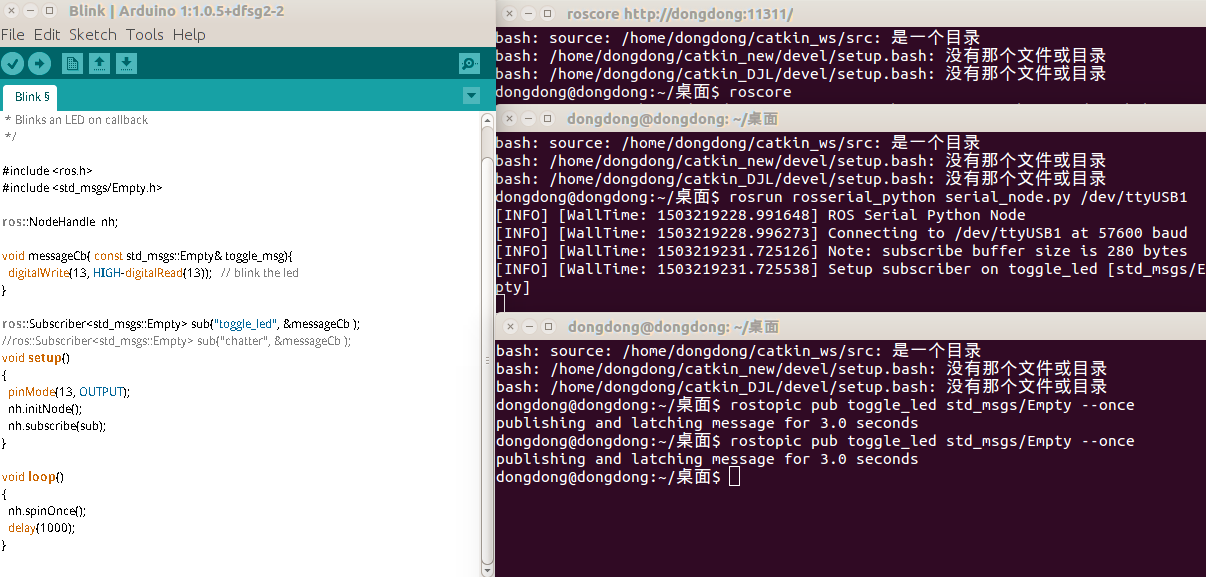
/* * rosserial Subscriber Example * Blinks an LED on callback */ #include <ros.h> #include <std_msgs/Empty.h>
//创建了一个节点句柄,这允许我们的程序能够创建发布者和订阅者,节点句柄同样和串口通信有关系。 ros::NodeHandle nh;
// 创建回调函数,必须使用一个消息的常引用作为一个参数。
// 消息类型是 std_msgs::Empty 消息的名字是toggle_msg
// 回调函数中,我们可以引用 toggle_msg,因为他是空的,所以就没必要了。接受到一次,让LED闪烁一次。
void messageCb( const std_msgs::Empty& toggle_msg){
digitalWrite(13, HIGH-digitalRead(13)); // blink the led
}
//创建一个订阅者subscriber , 订阅消息 toggle_led,消息类型是 std_msgs::Empty,回调函数是messageCb()
ros::Subscriber<std_msgs::Empty> sub("toggle_led", &messageCb );
//初始化ros的节点句柄,告知所有将要订阅的话题,订阅你想收听的任何话题。
void setup()
{
pinMode(13, OUTPUT);
nh.initNode();
nh.subscribe(sub);
}
//调用了ros::spinOnce(),在这个函数中,所有ROS通信的回调函数都被处理。
//在loop函数中,我们不需要去做任何其它的处理。因为这个函数ros::spinOnce()将会传递消息给subscriber的回调函数。
void loop()
{
nh.spinOnce();
delay(1);
}
烧录程序
在arduino IDE中点击upload按钮,运行程序。
运行ROS
新建窗口
roscore
接着运行rosserial客户端应用,它把你的arduino消息转发到ROS系统的其它部分:
rosrun rosserial_python serial_node.py /dev/ttyUSB0
最后你可以输入一下命令来查看你的arduino板子上的LED灯的变化情况:
rostopic pub toggle_led std_msgs/Empty --once
上述命令运行一次后LED灯亮了,再运行一下次又灭了,如此反复的运行,会发生相应的变化。