概述:STM32有3个发送邮箱,发送调度器根据优先级决定先发送那个,相当于有3个发送帧FIFO;接收方面有14个过滤器,通过编程可以从CAN的接收引脚中选择需要的报文然后分别给2个接收帧FIFO(每个可以有3个完整报文,等于分2组,共6个接收帧缓冲)。
IO设置:CAN_RX:输入上拉;CAN_TX:AF_PP复用推挽输出。
时钟设置:对应的GPIO时钟、AFIO时钟、CAN时钟(APB1)
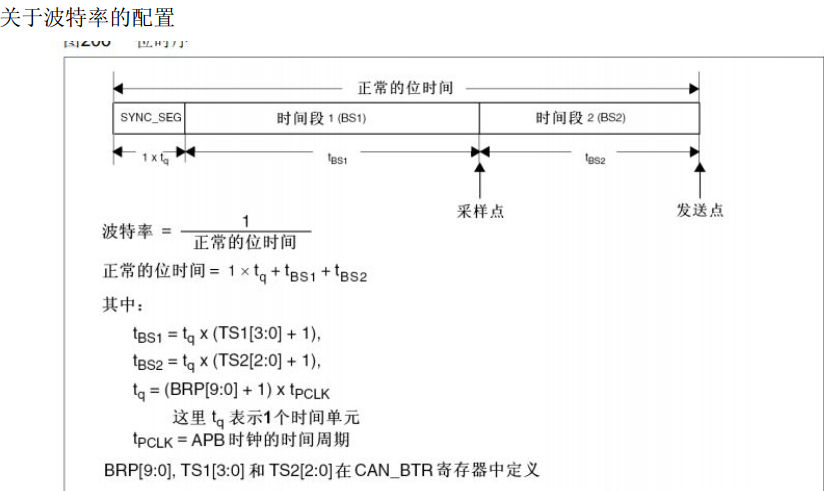
一 CAN的波特率:CAN1是挂在APB1上的(36MHZ),那么以下波特率=APB1/(1+3+5)/8=500K,

 二 其它的CAN设置常规,设置NVIC中断编写CAN1_RX0_ISR()接收中断。发送函数
二 其它的CAN设置常规,设置NVIC中断编写CAN1_RX0_ISR()接收中断。发送函数
void User_CANTransmit(uint16_t val){
CanTxMsg TxMessage; /* 定义CAN报文结构体 */
uint8_t TransmitMailbox;
TxMessage.StdId=val&0x7FF; /* 动态填充帧ID,防止碰撞 */
TxMessage.RTR=CAN_RTR_DATA; /* 数据帧 */
TxMessage.IDE=CAN_ID_STD; /* 标准帧 */
TxMessage.DLC=2; /* 数据场长度 */
TxMessage.Data[0]=val; /* 填充数据场 */
TxMessage.Data[1]=(val>>8); /* 填充数据场 */
TransmitMailbox=CAN_Transmit(CAN1,&TxMessage); /* 发送并获取邮箱号 */
while((CAN_TransmitStatus(CAN1,TransmitMailbox) != CANTXOK)); /* 等待发送完成 */
}
三 发送和接收的BUG在#include "stm32f10x_can.h"已经定义了专门的结构体CanRxMsg、CanTxMsg