天给大家介绍一下ABB机器人安全板和几种安全保护模式。
机器人系统可以配备各种各样的安全保护装置,例如门互锁开关、安全光幕和安全垫等等。最常用的是机器人单元的门互锁开关,打开此装置可暂停机器人.
控制器有四个独立的安全保护机制,分别为常规模式安全保护停止(GS)、自动模式安全保护停止(AS)、上级安全保护停止(SS)和紧急停止(ES)
控制原理:当3—4之间断开后,机器人进入急停状态,1—2的NC触点断开。
机器人紧急停止安全保护
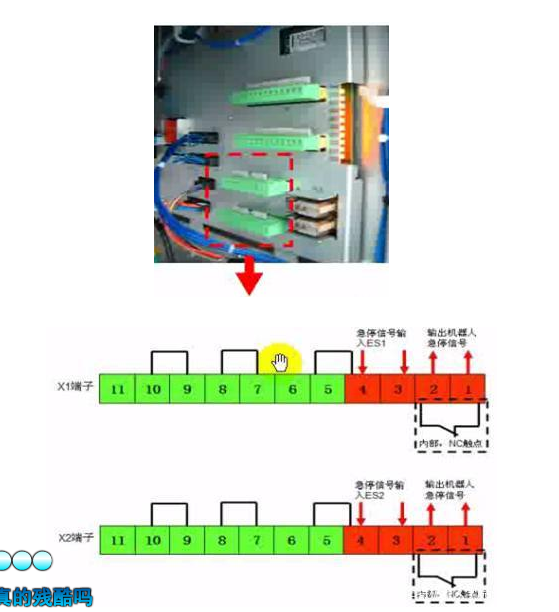
控制原理:当3—4之间断开后,机器人进入急停状态,1—2的NC触点断开。
连接说明:
1、将X1和X2端子第3脚的短接片剪掉。
2、ES1和ES2 分别单独接入NC无源接电。
3、如果要输入急停信号,就必须同时使用ES1和ES2。
机器人紧急停止安全保护
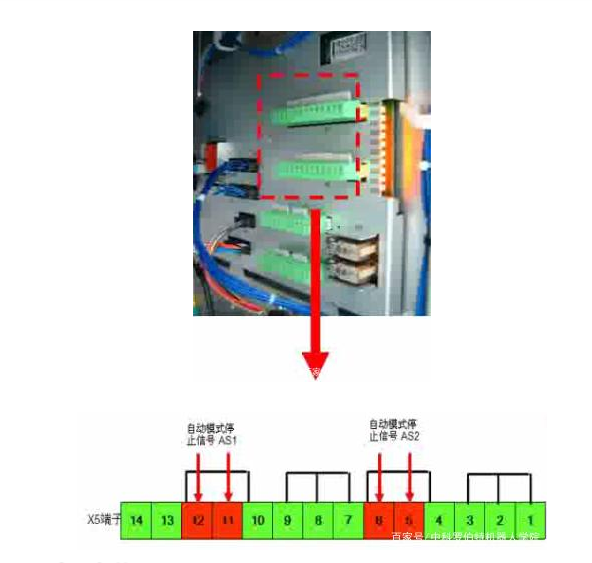
控制原理:当5—6、11—12之间断开后,在自动状态下的机器人进入自动模式安全保护停止状态。
连接说明:
1、将第5、11脚的短接片剪掉。
2、ASl和AS2分别单独接入NC无源接点。
3、如果要接入自动模式安全保护停止信号,就必须同时使用AS1和AS2