三维扫描学习目录
一、理论基础
二、边缘定位(原理)
2. 边缘细定位边缘(求解普遍亚像素边缘)
3. 针对圆型标志点曲率滤波
三、求解标志点圆心
4. 三种基于矩的亚像素级边缘定位方法分析(边缘模型一般参数求解,目的:求圆心坐标)
5. 一种基于矩的椭圆目标的亚像素级边缘定位方法(具体到怎么求解圆形标志点圆心坐标)
四、 因为相机本身的畸变原因,需要进行相机标定保证扫描结果的准确性
6. 相机的标定(一)参考坐标系简介(相机坐标系转换关系)
7. 相机的标定(二)相机的针孔模型(图像到世界坐标系转换公式)
8. 固定参数标定(理论基础,求解图像到世界坐标系转换公式参数)
9. 可变参数标定(理论基础,求解图像到世界坐标系转换公式参数)
基于两个相同圆的相机标定(实际应用,需要用到之前求出的圆心半径,以及坐标转换参数)
经过上述计算,得到的扫描点精度更高,接近真实值
一、逆向工程建模
传统产品开发正向设计:包括功能描述,概念设计,定制工艺流程,物体加工,产品检测.按照实物的样本,利用数字化技术重新构建模型,这种开发模式称为逆向工程(RE, reverse engineering),逆向工程就是将实物转化为CAD模型的过程。
逆向工程包括:实物几何外形数字化,CAD模型重建,产品或模具制造。
常用逆向软件:Imageware, Poltworks, Geomagic, ICEMSurf, RE-Sof, copyCAD。
1.实物几何外形数字化
获取目标表面三维信息,通常是通过三维扫描仪或其他测量系统对物体表面测量得到三维数据,并将这些离散的数据称为“点云”,点云是逆向工程中的原始数据,也是CAD建模的数据来源。
2.CAD模型重建
利用得到的三维数据进行模型曲面重构,重构的模型用于快速成型和数控系统加工。常用的曲面重构方法:函数曲面拟合,矩形域参数曲面拟合,三角面片曲面等。
二、影响精度的因素
1. 内部误差
仪器误差,激光测量距离的误差,扫描角度引起的误差,测量仪器的分辨率,与扫描仪的连接误差,激光光束偏转引起的误差,内外置相机标定和聚焦能力对构建模型的影响误差等.
2. 外部误差
被测物体表面颜色,工件表面倾斜度,操作误差,与环境有关的误差,圆心定位不准确等。
三、三维扫描的几种扫描原理
1. 三坐标测量
三坐标测量仪由三个相互垂直的测量轴和各自长度测量系统组成,还包括测头系统,控制系统,数据采集,计算系统和计算系统。固定测量件的位置,使传感器随着机器移动,这样可以瞄准测量物体的每一点,瞄准时通过传感器返回世界坐标数据。
2.投影光栅法
投影装置设置有特定编码的结构光,不同类型的结构光分别投射到被测物体上。摄像头1和摄像头2存在固定夹角,同时获得图像数据,对图像数据进行解码和相位运算得到相机坐标系内的三坐标。光栅投影的原理是通过结构光变形得到物体的表面信息。

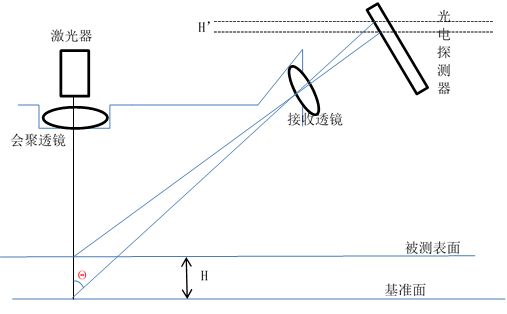
3 激光三角法
三维激光扫描仪由五部分组成,包括激光器,会聚透镜,被测表面,接收透镜,光电探测器。
激光器发射光线通过会聚透镜形成垂直光,激光传感器到基准面的距离固定,固定光电探测器到接收透镜的距离和角度,利用漫反射光到接收透镜的三角形相似,进而可以求出H的距离。
角Θ为激光器和接收透镜主轴之间的夹角,在调整好设备的情况下为已知固定值。
由于三角法需要Θ计算H,并且光电传感器有一定的长度限制,要能够在光电探测器成像必须满足tan(a) = K*tan(Θ),其中K被称为放大系数。
4 三种扫描方法对比
|
扫描方法 |
精度 |
成本 |
扫描范围 |
|
接触式三坐标测量仪 |
高 |
高 |
小,无法扫描软物体 |
|
投影光栅扫描仪 |
低 |
低 |
很大,对反射光极敏感 |
|
激光扫描仪 |
中 |
低 |
大 |