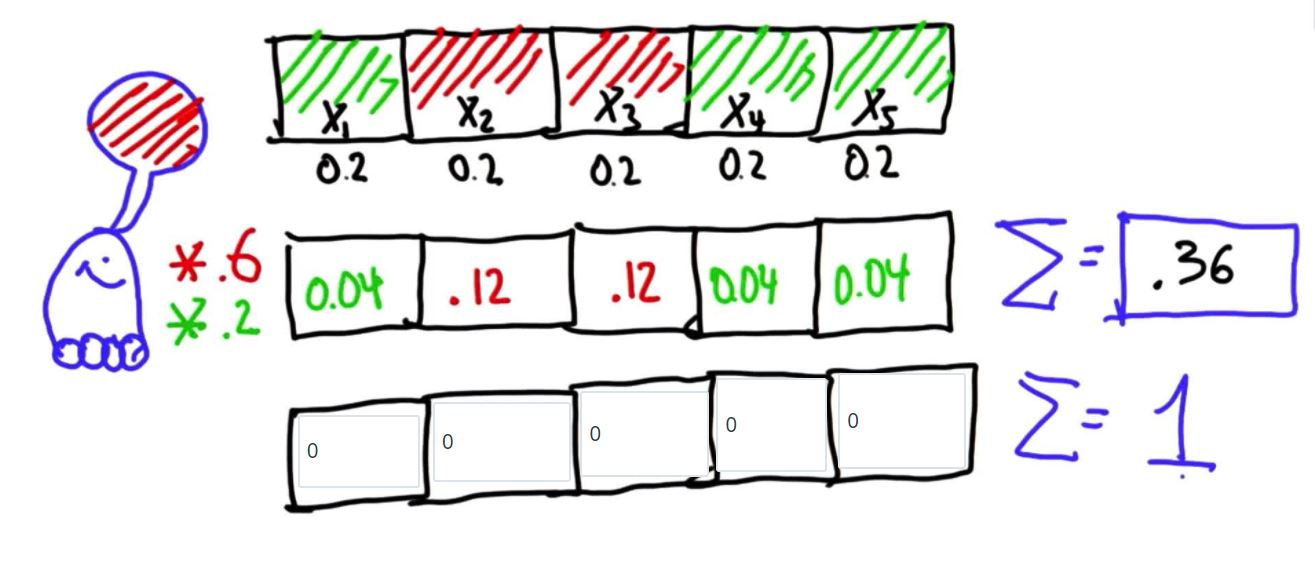
由上图,第一行每一网格的概率均为0.2,当机器人观察到红色后,红色网格概率乘以0.6,绿色网格概率乘以0.2,就可以得到图中第二行所示概率。可以发现这并不是一个概率分布,因为网格和为0.36.
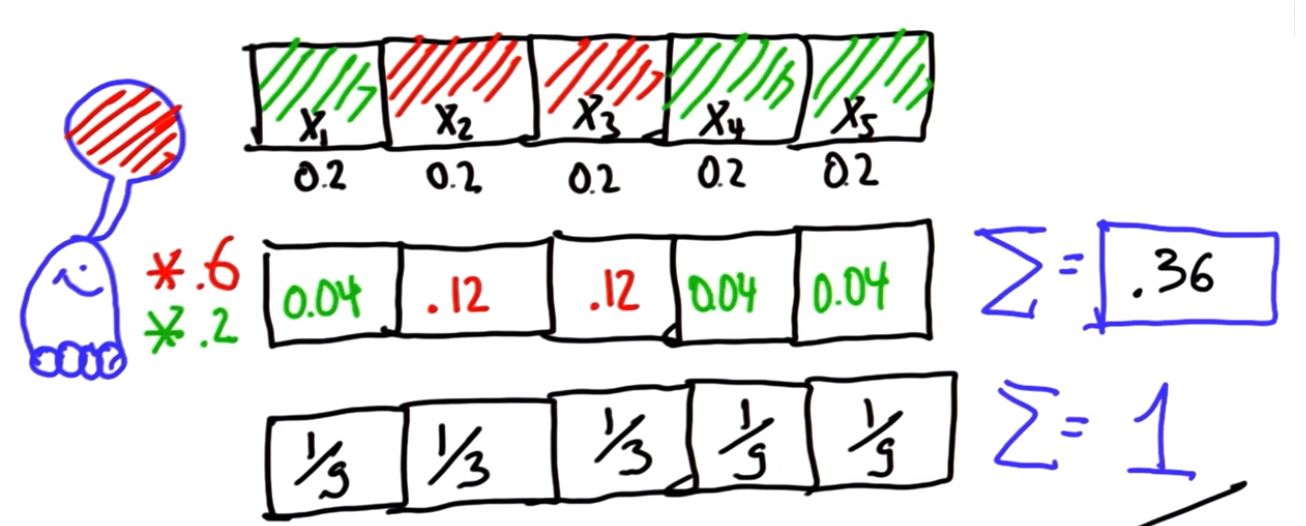
进行分布归一化处理,将第二行网格中的每一个数值除以0.36,可以得到如下图所示网格概率。
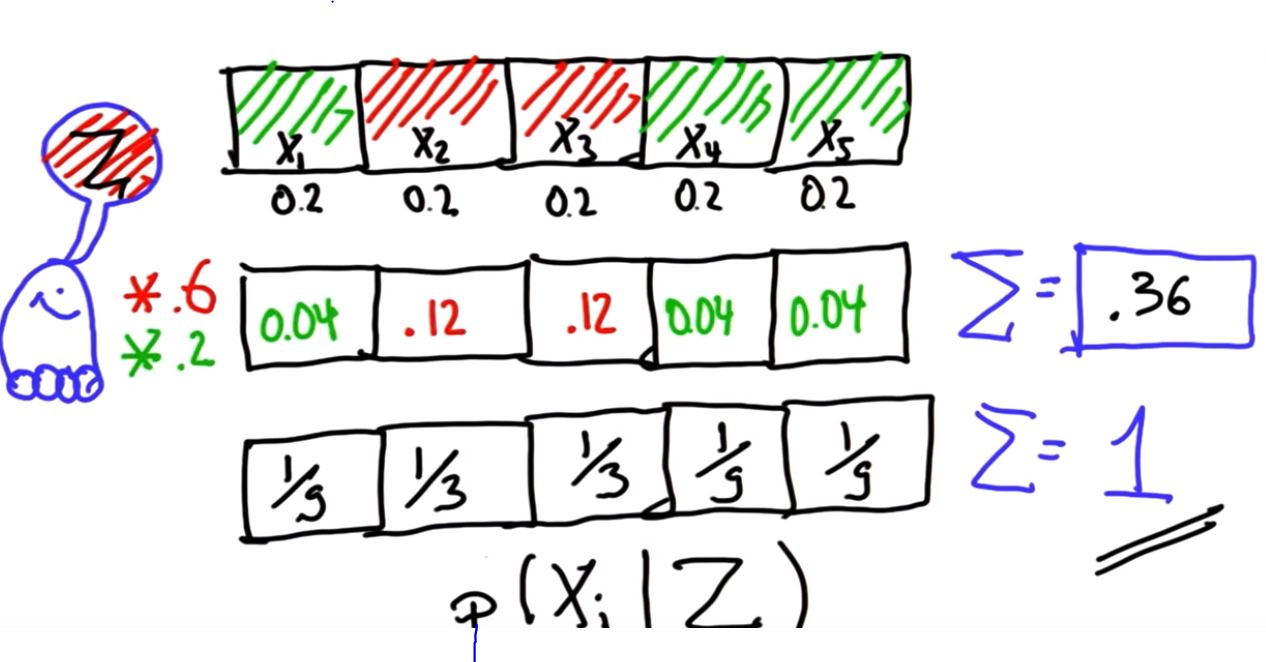
P(X/Z)被称为知道观察值Z后位置X的后验分布。
由上图,第一行每一网格的概率均为0.2,当机器人观察到红色后,红色网格概率乘以0.6,绿色网格概率乘以0.2,就可以得到图中第二行所示概率。可以发现这并不是一个概率分布,因为网格和为0.36.
进行分布归一化处理,将第二行网格中的每一个数值除以0.36,可以得到如下图所示网格概率。
P(X/Z)被称为知道观察值Z后位置X的后验分布。