博客转载自:http://www.cnblogs.com/21207-iHome/p/6230176.html
在机器人足球比赛中,实现基于视觉的对足球、双方机器人等目标的运动状态,如位置、速度、加速度等准确的估计是实现多机器人之间传球配合、防守拦截、更精确的运动规划和控制及更有效的战术行为的基础。
足球机器人的运动虽然灵活多变,无法准确预知,但也不是完全随机的,具有一些内在的规律可循。例如,机器人的运动通常是为了实现某种战术动作,像移动站位、追球、带球运动、阻截防守、传球配合等。在这些情况下,机器人的运动呈现明显的规律性。例如,追球与阻截防守运动的目标位置分别为足球与带球的机器人;带球运动的末端朝向是球门位置等。只有当机器人出现故障时,才有可能发生完全不规律的运动。
其次,足球机器人都是自主运行的,它的内在规律在一定程度上由其控制算法决定。反过来说,如果能对被跟踪目标采用的控制算法做出合理的假设,那么就能掌握目标的运动规律。而且,足球机器人的运动范围是受限的。例如,正常运行的机器人不会跑出场地区域,而且作为一个物理系统,足球机器人的运动能力也受到了电机功率、轮子与地面摩擦力等方面的限制。这些因素都可以作为先验知识融合到足球机器人的跟踪滤波算法中,以此提高算法的准确性以及针对性。
选择合适的目标运动模型是跟踪滤波算法设计的重要部分,建立合理的运动模型有助于准确地预测被跟踪目标的未来状态或运动轨迹,是实现精确跟踪控制的重要条件。在跟踪问题研究中,目标的运动模型主要以状态空间模型表示:

其中,xk为目标状态;uk为控制输入;wk为过程噪声;fk为与时间有关的向量函数,决定了目标的运动规律;k为采样时刻,通常与获得测量的时刻相对应。由于无法得知目标的真实控制输入uk,所以一般会忽略这一项并把它当作噪声的一部分。
1. 静止模型
在所有的模型中,最简单和基础的模型就是静止模型,即

其中,状态x=[x]只含有目标的位置分量;w(t)是零均值、方差为σ2的白噪声。对应的离散模型为:

静止模型认为目标基本没在运动,所有不可预知的控制作用和误差都是白噪声干扰。由于这个模型太理想化或者说目标几乎不可能处于静止状态,通常的目标跟踪问题不会考虑上述静止模型。但是在足球机器人比赛中,目标处于静止状态的可能性很大,比如守门机器人在大部分情况下是静止的;其他担当防守或进攻角色的机器人在到达其防守位置或是传球点时也会停下来等待局势的进一步发展。在这些情况下,只有静止模型才最符合目标运动的实际情况。更高阶或更复杂的运动模型需要很长时间才能收敛到静止状态,因而产生较大的误差。
2. 匀速与匀加速运动模型
相对于静止模型,二阶的匀速运动(CV)模型是更常见的模型,也称为非机动模型

其中,状态变量x包含了目标的位置与速度;w(t)是零均值的白噪声。对应的离散模型为
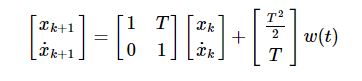
其中,T为采样间隔。
CV模型认为虽然干扰的存在会改变目标下一时刻的运动速度,但是目标在整体上是匀速运动(非机动状态)。这一模型的最大优点是形式简单,当目标机动幅度很小或采样间隔很短时,目标的运动确实可以有效近似为匀速运动。但是也正如其名,该模型不适合目标运动发生频繁或大幅度变化的场合。
在足球机器人比赛中,目标匀速运动通常发生在长距离运动的过程中。由于足球机器人的加速性能比较突出,通常只需要0.5~1s的时间就可以从静止加速到所需的甚至最高的速度,所以足球机器人通常会以(最高速度)匀速运动的方式完成长距离的移动。
在CV模型的基础上还有匀加速(CA)模型,其形式为
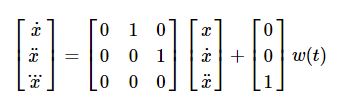
在实际应用中,足球机器人(或其他目标)真正匀加速运动的可能性很小或者持续的时间非常短。CA模型的主要作用是引入目标的加速度状态x¨x¨,以CA模型为基础可以衍生出更合理的模型以及通过引入加速度约束条件来提高跟踪滤波算法的精度与鲁棒性。
参考:
《机器人视觉系统研究》 科学出版社