带花树笔记
前言:名字的由来
树:增广交替树,即从(u)开始,由匹配边和增广边交替构成的树
对于二分图,增广过程中忽略偶环,因此就是一棵树
花:一般图存在奇环,在扩展增广树的过程中遇到奇环,就将奇环叫做花
与匈牙利算法的比较
算法的基本框架与匈牙利相同:
依次选取每个点作为根(rt),找到一条从根出发的增广路
增广路
是一条从根开始的路径,满足路径由已经确定的匹配边和增广边交替构成
且路径两段的边都是增广边,每个点至多被经过一次
二分图匹配算法的最终目的,都是找到一条增广路
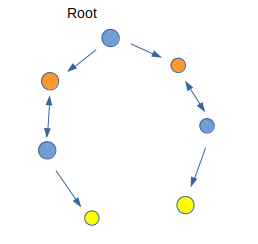
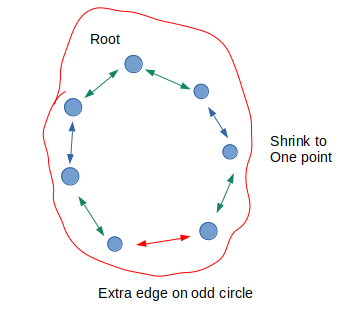
图中双箭头表示匹配边,单箭头表示增广边
按照每个点被遍历的情况进行染色
设(col_{rt}=1),即图中的蓝色点,这类节点为 增广节点
另一类点的(col_{i}=2),即图中的黄色/橙色节点
匈牙利算法
匈牙利算法采用( ext{dfs/bfs})直接搜索增广路
原因是:确定根之后每个点,每个点的( ext{col})固定,且一定存在一条合法的交替路径
只需要判断是否存在一个(col)为2的自由节点即可
为什么一般图不行?
(mathbb{Naive})的想法是:记录每个点是否能作为( ext{1/2})型点
存在的问题:
考虑一般图存在奇环,一个点如果绕奇环回到(u),产生不一样的(col)
而此时路径上就存在点的重复,这就违背了交替路径的性质
正式进入带花树
带花树算法的框架通过广搜建立一棵外向树,不妨称之为增广树
根据上面的分析,其实我们的算法目的是:
确定是否存在一条合法的交替路径,使得一个点(col=1,2)
为什么采用( ext{bfs})
如果采用( ext{dfs}),产生的边就有:
1.树边
2.返祖边
3.横叉边
4.指向后代的边
( ext{dfs})生成树中,2,3,4类边都可能构成环
如果采用( ext{bfs}),只需要考虑3类边成环
且环的两端一定对应增广树上非祖先关系的两个点
每次从队列中取出节点,试图增广一条边((u,v)),几种情况如下
1.(v)还未被访问过
1-1.(v)是空点,找到匹配路径
1-2.(v)已经被匹配,此时满足交替,扩展树形,从其匹配点继续
2.遇到偶环:依然忽略,因为对于增广无益
3.遇到奇环,即(col_u=col_v=1)
此时,奇环的两端对应树上一段交替的匹配路径
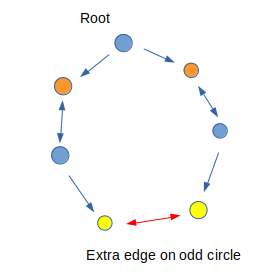
(为了简化情况,仅保留了花所在的部分)
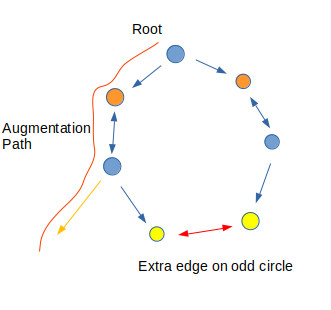
此时,可以发现:
从环的两边分别遍历下来,总能得到一个点(col)分别为(1,2)的情况
具体的,考虑最终增广路的样子
容易发现,对于任意合法增广路,总存在等价增广路,且其不经过奇环两次
1.穿过一个1类点(平凡情况)
此时直接翻转原先所在的路径
2.穿过2类点:额外情况
此时,通过环的另一边的路径恰好为我们需要的路径
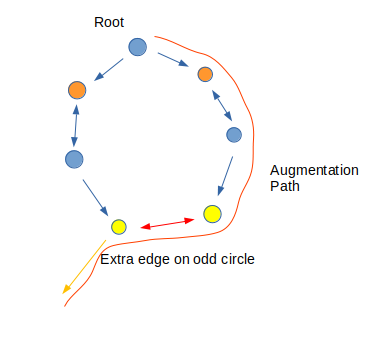
当然,花根不满足这个性质,所以才需要特殊处理
所以操作的结果是:
1.除了花根以外的所有(col=2)的点,增加(col=1)的情况
2.除了花根以外的所有(col=1)的点,增加(col=2)的情况
由于(2)型点不主动增广,所以处理奇环实际上就是:将奇环上的每个点视为1型点进行增广
那么我们可以直接将环上的点缩成一个点
同时将每个未被增广的点(即原先(col=2))(col)改为(1),加入队列
由于在处理过程中修改了图的结构,需要用并查集维护
实际实现细节较多,突出表现在:
1.在进行合并时,要在在一定程度上保留原路径的形态,以便最终找到增广路径后复原
容易发现,最终的增广路径会在环上走反边,因此原先的增广边需要加入改为双向边
最终的图就变成了
2.实际实现时并不能像合并树链一样每次找深的点跳上去
解决方法:先找到两个点的( ext{LCA}),然后分别合并两段路径
找到( ext{LCA})的过程为保证复杂度:
交替地跳两个节点,直到一个点被遍历了两次,那个点就是( ext{LCA})
这样复杂度就是:较深节点到( ext{LCA})距离( imes 2)
遍历标记不方便清空,所以采取时间戳的方式(详见代码)
这样就能做到合并节点复杂度为均摊(O(n))(忽略了并查集哈)
总复杂度(O(nm)),写不好可能为(O(n^3))
const int N=510,INF=1e9+10,P=1e9+7;
int n,m;
vector <int> G[N];
int col[N]; // vertex type
int F[N]; // for union find set
int match[N]; // match[u]=v ,match[v]=u holds if match[u]!=0
int pre[N]; // previous vertex on alternating tree
int Find(int x){ return F[x]==x?x:F[x]=Find(F[x]); }
// Switch augmentation path
void Switch(int u){
// match one by one...
while(u) {
int t=match[pre[u]];
match[match[pre[u]]=u]=pre[u];
u=t;
}
}
int LCA(int u,int v) {
static int clo,vis[N];
clo++;
// lca method: step by step !!!
// the problem is : we don't know the depths of both vertices
// but we can keep jumping alternatively , until the deeper vertex reaches lca
// so the complexity is the distance between deeper vertex and lca
while(1) {
if(u) {
u=Find(u);
if(vis[u]==clo) return u;
vis[u]=clo;
u=pre[match[u]];
}
swap(u,v);
}
}
queue <int> que;
void Shrink(int u,int v,int f) {
// shrink the path v->u->f
// add reverse edge
// turn point of type1 to type2 ,and push in
while(Find(u)!=f) {
pre[u]=v,v=match[u];
if(col[v]==2) col[v]=1,que.push(v);
if(Find(u)==u) F[u]=f;
if(Find(v)==v) F[v]=f;
u=pre[v];
}
}
int Bfs(int u) {
rep(i,1,n) col[i]=pre[i]=0,F[i]=i;
while(!que.empty()) que.pop();
que.push(u),col[u]=1;
//cout<<"tryna match "<<u<<endl;
while(!que.empty()) {
int u=que.front(); que.pop();
assert(col[u]==1);
for(int v:G[u]) {
if(Find(u)==Find(v)) continue;
if(!col[v]) {
col[v]=2,pre[v]=u;
if(!match[v]) return Switch(v),1;
col[match[v]]=1,que.push(match[v]);
} else if(col[u]==col[v]) {
//cout<<"lcaing "<<u<<' '<<v<<endl;
int lca=LCA(u,v);
//cout<<"shrink!!!"<<u<<' '<<v<<' '<<lca<<endl;
// the path has two parts
Shrink(u,v,lca);
Shrink(v,u,lca);
}
}
}
return 0;
}
int main(){
n=rd();
rep(i,1,rd()) {
int u=rd(),v=rd();
G[u].pb(v),G[v].pb(u);
}
int ans=0;
rep(i,1,n) ans+=!match[i] && Bfs(i);
printf("%d
",ans);
rep(i,1,n) printf("%d ",match[i]);
}