I2C总线是飞利浦公司推出的一种串行总线,所有器件共用两根信号线,实现数据的传输。
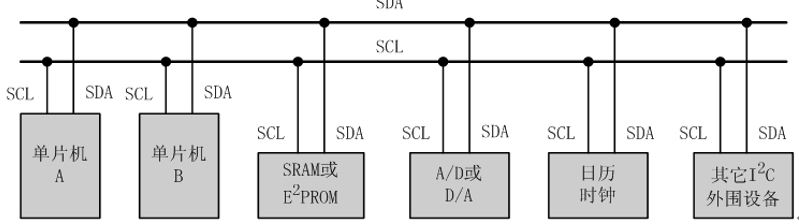
总线接口接了上拉电阻,默认为高电平,所以就可以用“当低电平出现”来标记出一种起始信号。我个人把它想象成:许多人在一条走廊上的不同房间(器件)里,大家都把门打开,连出两根长长的听筒(小时候玩的那种),每个人都从两根大主线上各接一根到自己房间里。两根听筒平时都是安静的(1)。如果有某房间的人叫了一声(0),那剩下的人就知道,我们准备开始通话了。
为了保证秩序,大家选出一个人当领队,由他来主导通话的过程。这就是总线的主机,其他人就是从机。从机有多个,主机只有一个。
两根信号线,一根叫数据线SDA,一根叫时钟线SCL。顾名思义,数据线用来传输数据,时钟线用来管理顺序。
怎么样表示开始,怎么样表示结束,用下面的图表示。注意有严格的时间规定。
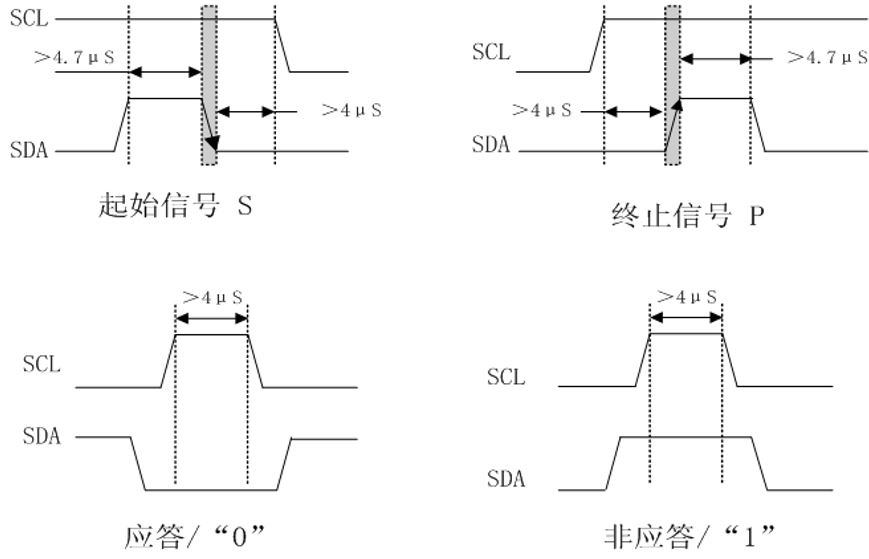
首先,我们知道怎么样算是通话的开始和结束(起始信号和终止信号)。然后,规定怎样算是回答“可以”,怎么算是回答“不可以”(应答和非应答)。
接着,我们要知道谁向谁喊话,所以要给每个房间的人都赋予一个名字,也就是地址。再用一个0或1表示方向,从谁到谁。
因此,数据传输的过程,大体就是如此:领队喊出“开始”,说出一个房间名,同时,所有房间的人确认是不是自己的。领队表明目的,说出是向他传数据,还是从他那读数据;然后,确认是自己房间的队员给出应答,可以就开始传输数据。完成后,主机/从机给出应答,表明收到了没有。
下面就是SDA上传送的数据格式。
(a)主机向从机发送数据

S表示起始信号。阴影表示主机发送。A表示应答,上加划线表示非应答。P表示停止。
(b)主机发送数据后,从从机读数据

(c)传输过程中,想改变方向

方法是,重复一次起始信号和从机地址,加一个方向位来改变方向。
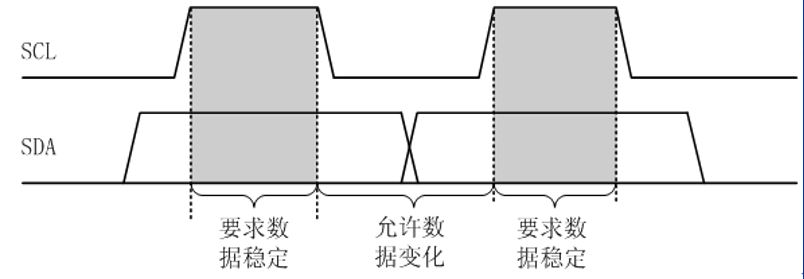
SCL是用来管秩序的。只要SCL保持高电平状态,SDA正在传的数据就不能乱动,只有把它拉低以后,SDA才能变化。这样确保数据传输不会乱套,所以在实际的传输过程中,SCL会不断地翻转。
另外,如果存在许多一样的器件,怎么区分呢?方法是把前几位固定不能动,表示是同一种器件,后面的几位可以动(可编程)。假如后面空出3位,那么就是可编程8个,也就是允许有8个同种器件接到总线上。前面的地址叫“器件地址”,后面的地址叫“首地址”。所以,每次主从通信时,要先传器件地址,加方向位,等器件应答;再传首地址来寻找特定的器件,再加方向位,等待它应答。接着开始数据传输。
写入过程:

读出过程:

下面是对于I2C总线模拟的一些关键函数的注释。
//延时10微秒函数
void Delay10us(void)
{
unsigned char a,b;
for (b=1;b>0;b--)
for (a=2;a>0;a--)
;
}
//I2C起始信号模拟
void I2cStart()
{
SDA = 1;
Delay10us();
SCL =1;
Delay10us();
SDA = 0;
Delay10us();
SCL =0;
Delay10us();
}
//I2C停止信号模拟
void I2cStop()
{
SDA = 0;
Delay10us();
SCL =1;
Delay10us();
SDA = 1;
Delay10us();
}
//I2C发送数据函数
unsigned char I2cSendByte(unsigned char dat)
{
unsigned char a = 0,b;
for(a=0;a<8;a++) //一位一位传输数据
{
SDA = dat>>7; //右移7位,最高位送给SDA
dat = dat<<1; //左移一位,次高位变成最高位
Delay10us();
SCL = 1;
Delay10us();
SCL = 0; //翻转SCL,SCL为低电平时传输的数据才能改变
Delay10us();
}
SDA = 1;
Delay10us();
SCL = 1; //释放数据线和时钟线
while(SDA) //等待从机应答,如应答则SDA拉低跳出循环
{
b++; //一段时间没有应答就认定为失败
if(b>200)
{
SCL = 0;
Delay10us();
return 0; //数据发送失败
}
}
SCL = 0;
Delay10us();
return 1; //数据发送成功
}
//I2C读取数据函数
unsigned char I2cReadByte()
{
unsigned char a = 0;
SDA = 1; //拉高数据线,保持空闲等待数据
for(a=0;a<8;a++) //一位一位读取数据
{
SCL = 1; //拉高时钟线,保持数据稳定,准备接收
Delay10us();
dat<<=1; //左移一位,空出一位准备读数据
dat |= SDA; //或运算,dat空出的位为0,如SDA也为0则为0,SDA为1就为1,相当于保存SDA数据
Delay10us();
SCL = 0; //翻转时钟线,使下位数据能够改变
Delay10us();
}
return dat; //返回读取的数据
}
//向At24C02芯片写数据函数
void At24c02Write(unsigned char addr,unsigned char dat)
{
I2cStart(); //起始信号
I2cSendByte(0xa0); //发送器件地址(固定)
I2cSendByte(addr); //发送首地址(自定)
I2cSendByte(dat); //发送数据
I2cStop(); //停止信号
}
//读数据函数
unsigned char At24c02Read(unsigned char addr)
{
unsigned char num;
I2cStart(); //起始信号
I2cSendByte(0xa0); //发送器件地址(固定)
I2cSendByte(addr); //发送首地址(自定)
I2cStart(); //加一个起始信号,用于改变数据传送方向
I2cSendByte(0xa1); //读取器件地址,最后一位表示方向
num = I2cReadByte(); //保存读取的数据
I2cStop(); //停止信号
return num;
}