首先说明公式的写法
上标代表了一个样本,下标代表了一个维度;
然后梯度的维度是和定义域的维度是一样的大小;
1、batch gradient descent:
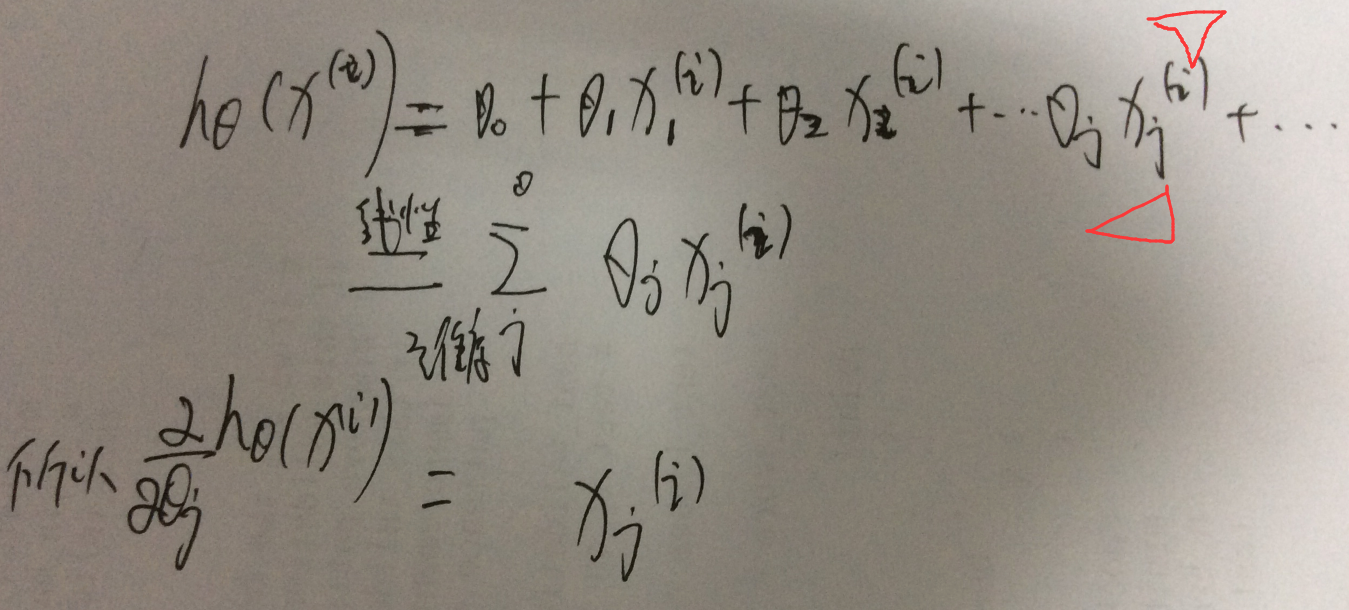
假设样本个数是m个,目标函数就是J(theta),因为theta 参数的维度是和 单个样本 x(i) 的维度是一致的,theta的维度j thetaj是如何更新的呢??

说明下 这个公式对于 xj(i)
需要说明,这个代表了样本i的第j个维度;这个是怎么算出来的,要考虑 htheta
2、SGD
可以看到 theta的一个维度j的一次更新是要遍历所有样本的,这很不科学

转换为 单个样本更新一次,就是sgd

3、什么是adagrad
就是 自适应sgd,是在sgd上的改进
3.1、首先总结sgd的缺点

就是参数 theta的第t+1次更新的时候
使用theta的上一次取值-learning rate* 目标函数C在theta的上一个取值时候的梯度;-----其实梯度是一个向量既有大小也要方向(一维的时候,斜率就是梯度越大代表月陡峭 变化快)----梯度大小代表了变化快慢程度,梯度越大代表变化越快
但是learning raste eta是固定的,这会有问题的,实际希望 eta是可以动态变化的

也就是说如果梯度 steep,那么希望eta 可以小一点,不要走那么快吗!如果梯度 很平滑,那么可以走快一点
3.2、adagrad具体推理过程


4、具体实现:关于sempre中是如何做的?这里传入的梯度是没有做L1之前的梯度
所以总共有三种情况,这里的实现主要是2这种情况;
》》最早的解决L1就是sgd-l1(naive) 是用次梯度
缺点 不能compact 更新所有特征
》》sgd-l1(clipping) 做剪枝
》》sgd-l1(clipping+lazy_update)<=====>sgd-l1(cumulative penalty) 做懒更新
4.1、实现 sgd-l1(clipping)
首先看下 sgd-l1 nonlazy的操作,就是 做 clipping sgd-l1(clipping),所谓cliping就是对于penalty 做拉成0的操作。
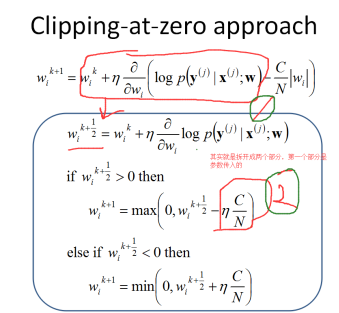
就是简单看下 wi是正还是负,然后取值{1,0,-1},然后那个参数C是控制 the strength of regularization。这种对应的就是 sempre的 nonlzay的情况:
Params.opts.l1Reg = "nonlazy" will reduce the sizes of all parameter weights for each training example, which takes a lot of time.

Adagrad如何计算梯度呢?
