Acquistion Location Confidence for accurate object detection
本论文主要是解决一下两个问题:
1、分类得分高的预测框与IOU不匹配,(我猜应该是训练数据集导致的)
2、基于回归的边框修正是非单调的,缺乏可解释性。
贡献点
- IoU-guided NMS
- Optimization refine
- PRpooling
1、IoU-guided NMS

(1)传统 NMS : 根据边界框的分类置信度排序,每次选择cls score最大的框,并对与它IoU大于阈值的框抑制。定位准确的边界框中有很大一部分会被错误抑制,这是由分类置信度和定位准确度之间的不匹配造成的,
(2)IoU-NMS : 使用预测得到的IoU来对预测框进行排序,每次选择IoU最大的框并对与它IoU大于一定阈值的框抑制。
(3)soft-NMS:NMS基础上,IoU 大于阈值的框不将其分类置信度置为0。
为了使用IoU来指导排序,但在在测试的时候没有GroundTruth信息,于是设计一个网络来
估计边框与GroundTruth的IoU。如下图所示。

虚线框的是IoU-Net。
输入:Jittered-RoIs:通过对groundtruth 随机变换得到一系列的候选框(而不采用RPN输出的RoIs)
损失:smooth-L1 LOSS
输出:候选框与GroundTruth的IoU交并比(用于后续的IoU-guided NMS和优化修正算法)
2、提出的PrPooling代替了原来的RoI pooling
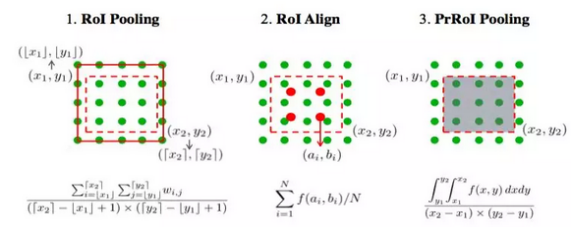
因为RPN网络输出的bounding box的坐标是浮点数,
- RoI Pooling:有量化误差
- RoI Align:不用量化,利用双线性插值计算出对应点的特征值。 但N=4固定,ROI大小不固定。
- PrRoI Pooling:利用双线性插值计算出对应点的特征值,该函数连续可导,有益于后续的基于优化的边框修正。
论文中的不足之处,缺少PrRoI-pooling的对照实验。在Mask-RCNN中的RoIAlign的精度相对于RoIPool明显提高。
The code is released at: https://github.com/vacancy/PreciseRoIPooling
3、基于优化的边框修正
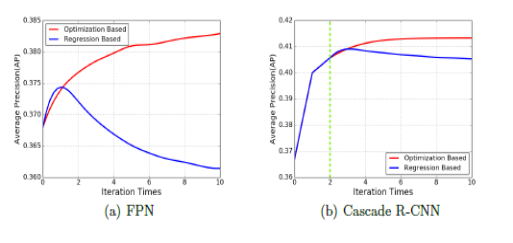
问题:
基于回归的边界框精修非单调,对输入的分布变化敏感,不同的预测框迭代次数没法自适应。
解决方法:
通过每次修正得到的边界框预测得到IoU来修正。
基于优化的算法部分:
每次迭代对不同的预测框都做一次修正,因为PrRoI-Pool是连续可导的,所以通过梯度上升的方式进行优化,计算出边界框的变换。当变换后的边界框送入IoU-Net得到新的IoU与旧的IoU区别小于一定值或者出现退化,该边界框就不在修正。
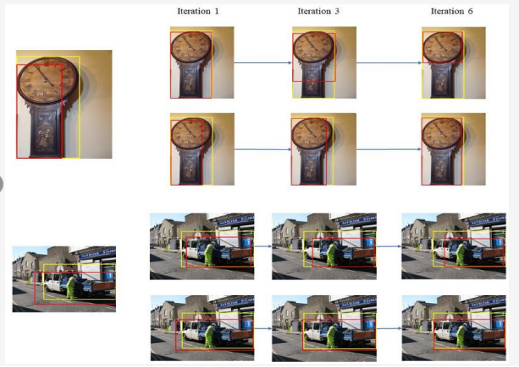
基于回归的方法:如图第一排随着迭代次数的增加,红色的预测越来越偏离GroundTruth
基于优化的方法:如图第二排随着迭代次数增加,预测框越来越精确。
4、实验细节
(1)数据集:
80类别的MS-COCO 80k张训练图像和35k张验证图像,5k张验证图像做测试。
(2)训练参数设置:
输入图像裁剪为1200*800的大小
IoU-Net的训练数据是另外产生的。对于IoU-Net的 IoU标签通过正则化变为【-1,1】之间。
每层的参数设置为mean=0,标准差=0.01或0.001的高斯分布,batchsize大小为16,在推理部分,先还是使用了一次边框回归来初始化坐标,为了加快推理,对所有检测框做IoU -NMS前100个最大分类置信度的边框再使用基于优化的算法进行微调。
5、实验结果比较
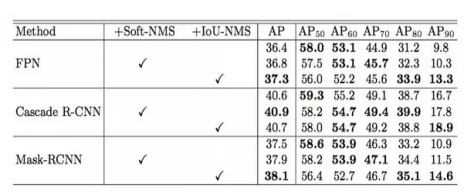
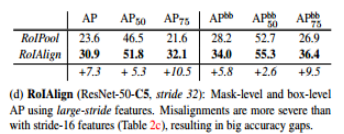
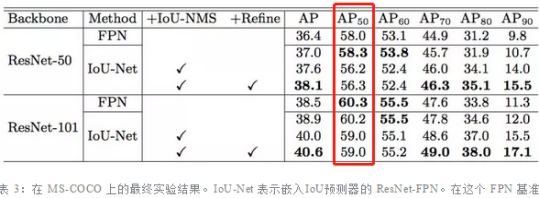
相比于soft-NMS,采用了IoU-NMS的结果在AP90上明显提高了。
问题:AP50的结果较差。
问题原因:因为较小的IoU的框与GroundTruth的特征差异大,导致了IoU预测器不精确,修正也退化了。
解决方法:通过采集更多小IoU的来训练就可以解决
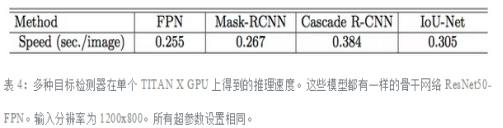
IoU-Net相较于FPN、Mask-RCNN速度下降了一点,但精度有所提升,时间耗费应该主要是在基于优化的边框修正上