1.功能概述
几何校正是指通过一系列的数学模型和控制点来改正和消除非系统性误差导致的几何变形,从而实现与标准影像或地图的几何整合。

校正前 校正后
几何变形指像元在图像坐标系中的坐标与其在地图坐标系等参考坐标系统中对应坐标之间的差异,也称几何畸变。其表现为原始图像上地物的几何位置、形状、大小、尺寸、方位等特征与其对应的地面地物特征的不一致。
遥感图像几何变形的误差可分为系统性误差和非系统性误差。
系统性误差(内部):指遥感系统造成的误差,一般由遥感系统本身或遥感系统与地球自转或地球曲率共同引起,这种误差一般是可预测的,有一定的规律性。
非系统性误差(外部):指由于遥感平台的时空变化特性引起的几何误差,如数据采集时传感器的随机运动,通常包括高度变化和姿态变化(如翻滚、俯仰和偏航)。
误差来源:
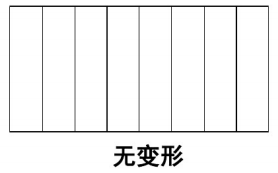
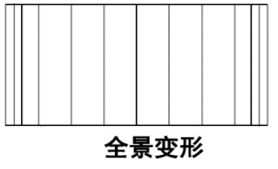
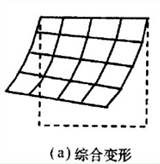
- 传感器成像方式引起的图像变形

- 传感器外方位元素变化的影响

- 地形起伏引起的像点位移
当地形存在起伏时,会产生局部像点的位移,使原来本应是地面点的信号被同一位置上某高点的信号代替。由于高差的原因,实际像点P距像幅中心的距离相对于理想像点P0距像幅中心的距离移动△r。

- 地球曲率引起的图像变形
地球曲率引起的像点位移类似于地形起伏引起的像点位移。
△h看作是一种系统的地形起伏,就可以利用像点位移公式来估计地球曲率所引起的像点位移。

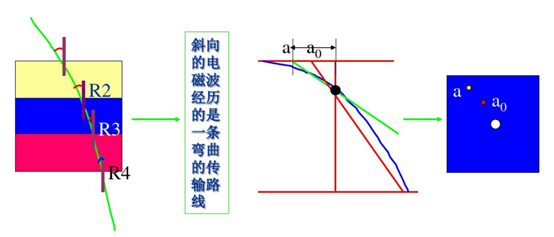
- 大气折射引起的图像变形
- 地球自转的影响
对瞬时成像的框幅式成像方式卫星影像不会引起图像变形。对扫描成像的卫星会造成图像的平行错动,实际成像范围为存在扭曲的四边形区域。

几何粗校正:指地面站根据测定的与传感器有关的各种校正参数对接收到的遥感数据所作的校正处理,能够消除传感器内部畸变,但校正后的图像仍有较大的残差。
几何精校正:是指消除图像中的几何变形,产生一幅符合某种地图投影或图形表达要求的新图像。几何精校正回避了成像的空间几何过程,并且认为遥感图像的总体几何畸变是挤压,扭曲、缩放、偏移及其他变形综合作用的结果。
1、图像具有较高精度,可满足遥感测图与底图更新的需要。
2、保证同一地区,不同传感器、不同光谱范围及不同成像时间的各种图像数据的几何一致性,能够进行计算机自动分类、地物特征的变化监测等应用处理。
- 对图像信息进行分析,制作满足测量和定位要求的各类遥感专题图。
2.基本概念

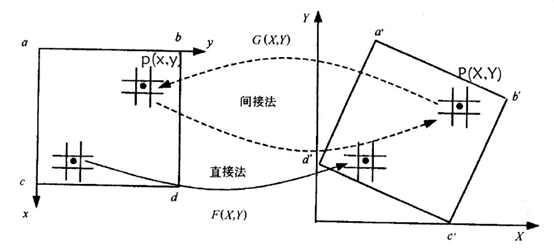
直接校正法:从原始图像出发,按一定的换算关系求出变换后的图像。
间接校正法:从校正后的图像出发,按一定换算关系反求算出原始图像上的像点坐标。
多项式校正原理:选择一个多项式近似描述校正前后相应点的坐标关系,利用控制点的图像坐标和参考坐标系中的坐标,按最小二乘法原理求解出多项式的系数,然后以此多项式对图像进行几何校正。常用的二元齐次多项式模型可表示为:
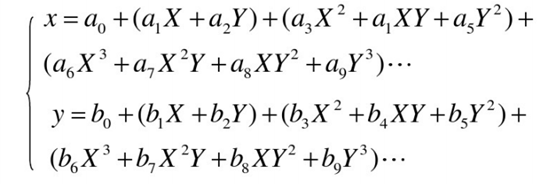
求出多项式系数,一般选择最小控制点的数量为:(n+1)(n+2)/2,n为多项式的次数。
注意事项:
1、多项式校正的精度与地面控制点的精度、分布、数量及校正的范围有关。地面控制点的精度越高、分布越均匀、数量越多,几何校正的精度越高。
2、采用多项式校正时,即使平均误差较小,并不能保证图像各点的误差都小。
3、多项式阶数的确定,取决于图像的几何变形程度,若变形不大,用1阶多项式也可,并非越高效果越好。
3.演示数据
使用数据:
选用一景河北廊坊地区的GF1影像作为待校正原始图像,及对应区域的基准影像用于选取控制点。
序号 | 数据名称 | 数据说明 |
1 | GF1_PMS2_E116.9_N39.4_20131127_L1A0000117694-PAN1 | 待配准的影像数据 |
2 | langfang-mos-sub | 基准影像 |
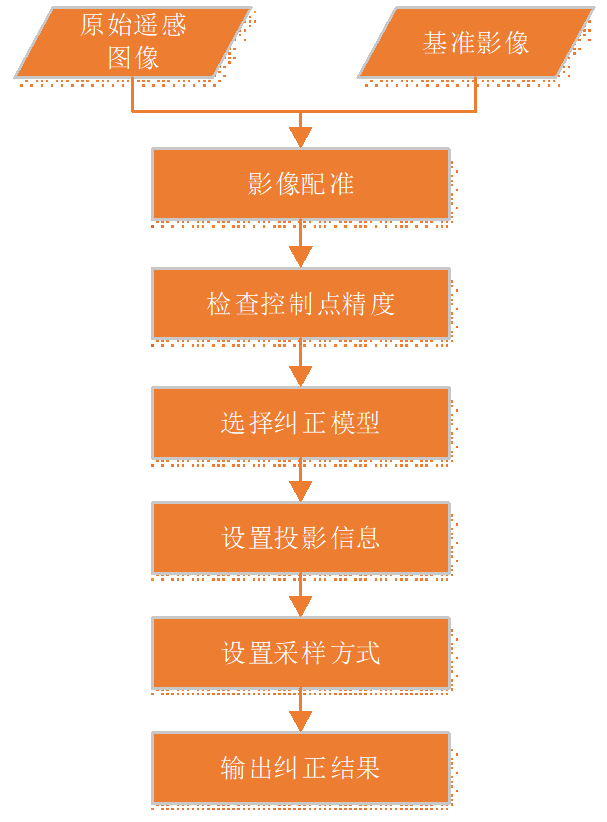
4.操作演示
影像配准:
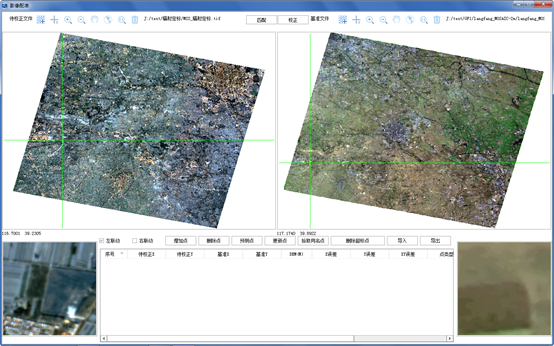
打开PIE-Basic软件,选择菜单栏【影像预处理】à【几何校正】à【影像配准】, 打开"影像配准" 界面, 加载影像:
几何精校正:控制点选取完成后,进行几何精校正处理。
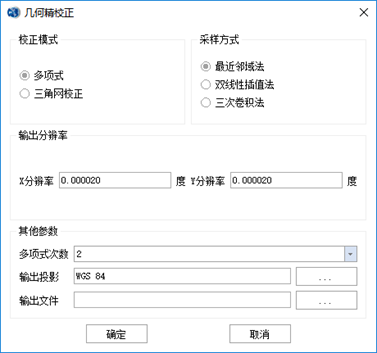
- 校正模型:校正模型分为多项式模型和三角网校正模型,三角网校正模型适合于控制点(GCP)分布不规则的情况;
- 采样方式:提供最近邻点插值、双线性插值和三次卷积插值三种重采样方法;
- 输出分辨率:设置输出影像的X分辨率和Y分辨率;
- 多项式次数:目前多项式次数仅支持1次和2次(当纠正模型设置为三角网校正模型时不需要设置此参数);
- 输出投影:设置输出文件的投影信息;
- 输出文件:选择输出结果的保存路径和名称。
结果分析:在软件中加载几何校正结果与基准影像,使用菜单栏【常用功能】à【卷帘】工具,以卷帘的方式查看几何校正的精度。

