引文
最近笔者也在寻找目标检测的其他方向,一般可以继续挖掘的方向是从目标检测的数据入手,困难样本的目标检测,如检测物体被遮挡,极小人脸检测,亦或者数据样本不足的算法。这里笔者介绍一篇小样本(few-shot)数据方向下的域适应(Domain Adaptation)的目标检测算法,这篇新加坡国立大学&华为诺亚方舟实验室的paper《Few-shot Adaptive Faster R-CNN》被收录于CVPR2019,解决的具体问题场景是我们有在普通常见场景下的汽车目标检测,我们只有少量雾天暴雨极劣天气环境下的汽车样本,那么我们可以使用成对采样(pairing-sampling)的方法,源域(source domain)即普通场景下的汽车样本(Car_{s})和目标域(target domain)即恶劣天气下的汽车样本(Car_{t})成对((Car_s,Car_t))组成负样本,另一方面源域下成对组成正样本((Car_s,Car_s)),使用GAN的结构,判别器(discriminator)尽可能去分辨正负样本的不同,也就是分辨出源域和目标域的样本,生成器(generator)是尝试去迷惑判别器。这就是这个算法的主要思想,主要是把域适应的思想应用到了目标检测上。
论文源码还没完全开源,只找到了个官方的repo:https://github.com/twangnh/FAFRCNN
思考
在介绍文章具体网络设计和损失函数的设计之前,我们可以带着一个问题去思考。
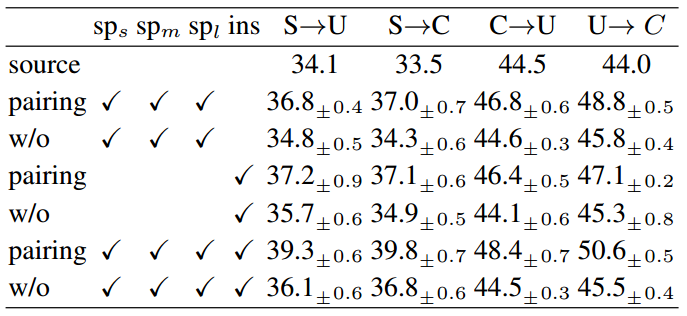
- 用GAN的结构,数据样本使用(Car_s)作为正样本、(Car_t)作为负样本也可以使判别器(discriminator)分辨出源域和目标域的样本,为什么这里要组成对的去训练?
算法设计
-
- 图像级别的域适应
-
- 实例级别的域适应
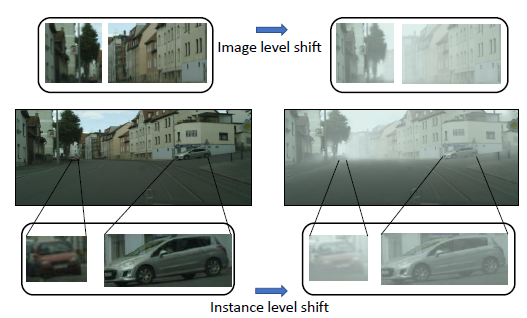
具体可以看下面Fig2的第一行和第三行,图像级别下的域迁移是整体图像各个像素组成的域迁移,实例级别的域迁移是汽车样本下的域迁移。
图像级别的域适应
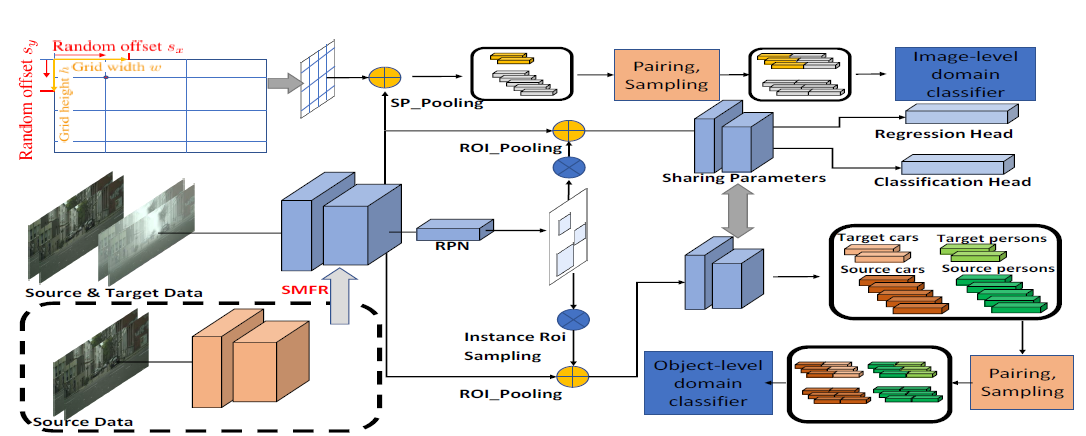
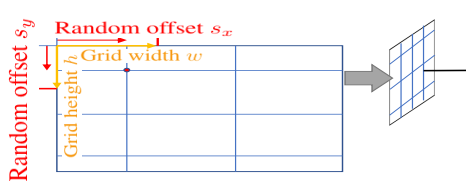
图像级别的域适应(Image-level Adaptation) 是为了完成image-to-image的转换,论文提出了split pooling(SP)的方法,作用是为了随机放置grid,做法也是十分简单,grid cell的宽为w,高为h,然后随机生成sx和xy,grid根据sx和sy调整位置。
后面就可以用对抗训练的方式训练生成器和判别器了,但是因为目标域的样本是小样本数据,所以这里提出了成对训练的方式,即源域对(G_{s_1}={(g_s,g_s)})和源域-目标域对(G_{s_2}={(g_s,g_t)})。判别器判断样本来源,生成器是特征提取器器目标是混淆判别器。
另外论文在图像级别的域适应用了三个GAN,实用性不知道如何。
实例级别的域适应
跟Faster R-CNN中不同的是:foreground ROIs要求更高的IOU阈值(比如原本IOU要求是0.5的,现在可能要0.7)。获得了ROI特征之后会根据ROI的label分组,源域目标特征是(O_{is}),目标域目标特征为(O_{it}),如果一共有C类,(iin[0,C]),第0类为背景,其实跟图像级别的成对方式一样,源域对(N_{i1}={(n_{is},n_{is})})和源域目标域对(N_{i2}={(n_{is},n_{it})}),其中(n_{is}sim O_{is},n_{it}sim O_{it}),以下为域判别器的损失函数:
以下为feature generator的损失函数:
源域模型特征正则化
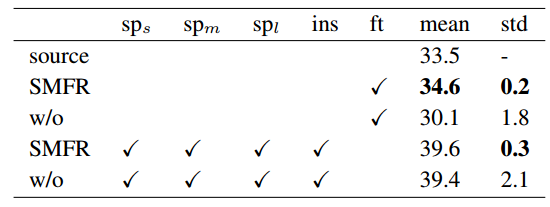
这个部分就是Fig 1中的SMFR模块,全称为Source Model Feature Regularization,他的作用是正则化源域模型,具体来说,就是源域样本(x_s)经过论文的域适应adaptation之后的特征提取器(f_t)和初始时拥有的仅有源域样本训练的特征提取器(f_s)要尽可能的一致,这样才能使模型更加鲁棒,文章用了L2正则。
但是因为是目标检测模型,我们更关注的是图片的前景目标本身,所以我们要求的是源域样本(x_s)经过特征提取器之后的前景部分变化不大。
其中(M)为前景的mask,k为正例掩码位置的个数。
实验结果
实验中数据集采用以下5种:
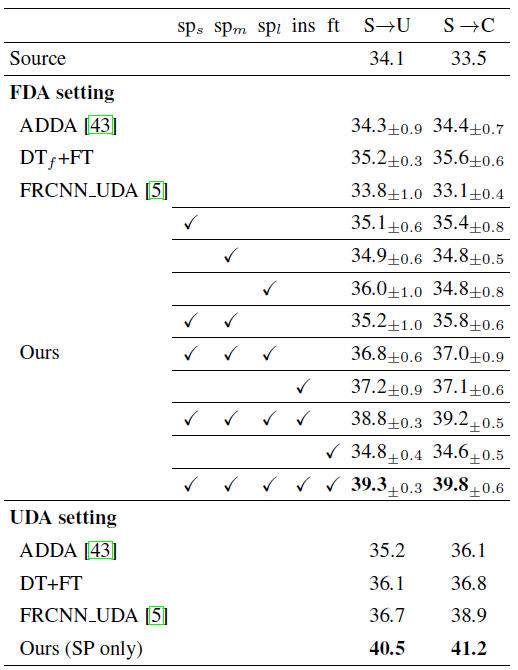
- Scenario-1: SIM10K to Udacity ((S ightarrow U));
- Scenario-2: SIM10K to Cityscapes ((S ightarrow C));
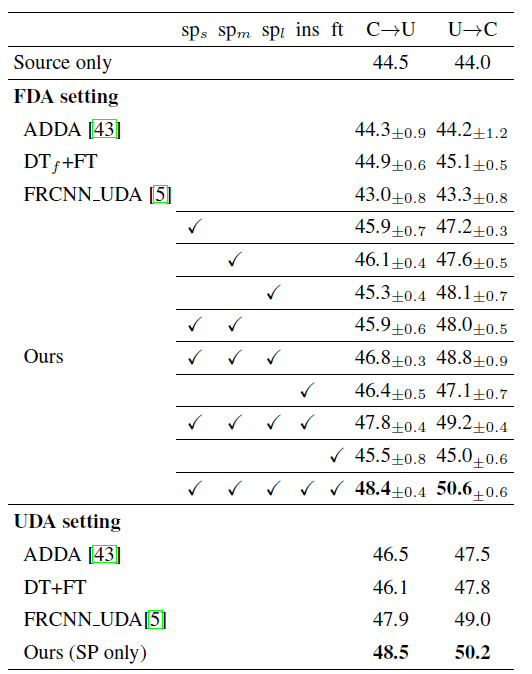
- Scenario-3: Cityscapes to Udacity ((C ightarrow U));
- Scenario-4: Udacity to Cityscapes ((U ightarrow C));
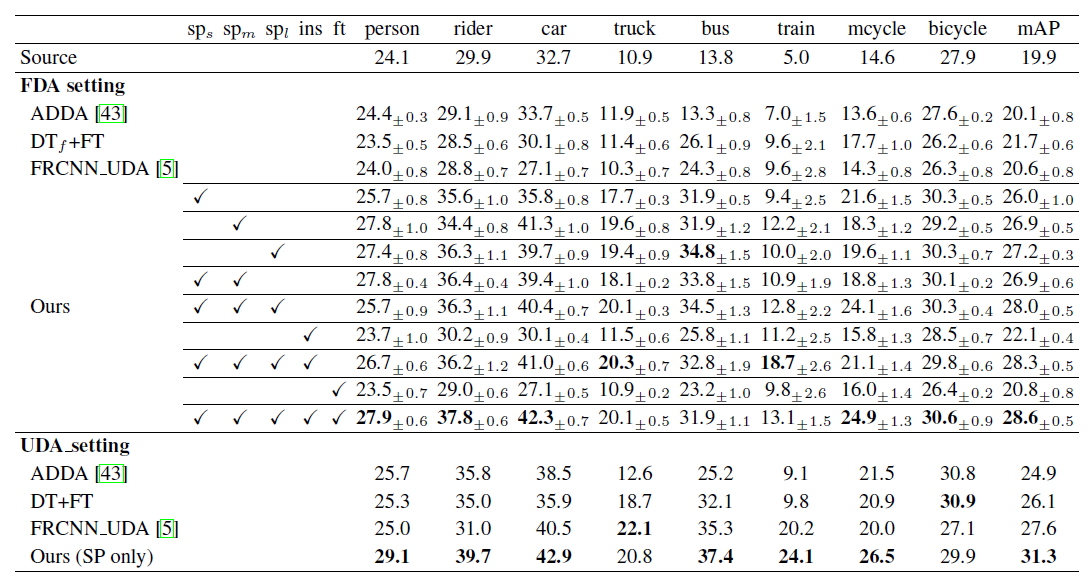
- Scenario-5: Cityscapes to Foggy Cityscapes ((C ightarrow F)).
以下都是采用AP作为对比评价指标。
 |
 |
总结思考
回答文首的问题,相信很多读者读完全文之后肯定也知道答案了,paper题目就是基于小样本学习方向的,其实需要成对训练的目的就是增加训练样本,如果源域样本(Car_s)有n个,目标域样本(Car_t)有m个(n>m),那么最后负样本的个数仅仅只有m个,因为是小样本,训练出来的效果也会十分的差。但是如果成对训练(pairing-sampling),正样本为((Car_s,Car_s)),理论上样本数量为(n^2),为s负样本为((Car_s,Car_t)),理论上样本数量为(n*m),虽然经过这样笛卡尔积之后的正负样本比没有变,但是负样本数量却是增多了。这也是整篇文章的主要思想,pairing-sampling的去训练。
参考文献
- [1]. Eric Tzeng, Judy Hoffman, Kate Saenko, and Trevor Darrell. Adversarial discriminative domain adaptation. In Computer Vision and Pattern Recognition (CVPR), volume 1, page 4, 2017.