这篇文章,同一个人(团队?)写的,遗憾的是,没怎么看懂。怎么说呢,里面的关于对偶的性质实在不知道从何入手,但想来还是得记一笔。
引
这篇文章,讨论的是这样的一个问题,有一个矩阵(M in mathbb{R}^{n_1 imes n_2}),但是因为种种原因,我们只能知晓其中的一部分元素即(P_{Omega}(M)),那么问题来了,有没有办法能够恢复(M)呢,或者说在什么条件下我们能恢复(M)呢(实际上,这个问题好像是作者前一篇论文已经给出了答案)?然后,又有新的困难,因为我们的观测是有误差的,也就是说我们观测到的实际上不是(P_{Omega}(M)),而是(P_{Omega}(M+Z))。
作者总拿Netflix举例子,类似地,我们可以用网易云来举例子(虽然估计网易云的推荐方法和这个并没有啥大关系)。
我们可以这么想,(M)的每一行是一个用户,每一列是一首歌,其中的每一个元素是该用户给这首歌打的分(当然,这个分可能是通过一些操作的判断的,比如收藏,评论,下载,是否跳过等等)。显然,一个用户不可能听过里面的所有的歌,一首歌也没法让所有人都听(打分),所以,我们所见识到的是(P_{Omega}(M)),一个稀疏的矩阵。然而,推荐歌曲,关注的就是那些用户没有听过的但可能被打高分的歌,所以我们要做的就是利用(P_{Omega}(M))恢复出(M)。听起来的确蛮好玩的。
然后问题是,恢复需要什么前提。很显然,如果一首歌没有被人听过,或者该用户没有听过任何歌,肯定没法把分数恢复出来,因为这跟瞎猜没分别,所以,假设就是(M)低秩,但是每行每列不能全为零。
和之前一样,作者采用不连贯条件来描述:
恢复1
本来,是应该求解下述问题的:

但是,这个问题很难求解(NP-hard)。
然后(mathrm{rank})的凸放松是(|cdot|_*)核范数,所以:

核范数与SDP
然后,作者指出,核范数可以通过对偶,转换成一个半正定规范问题(看这篇论文最大的收获吧)。
先来前推后,只要构造出这么一个(W_1)就可以了。假设(X = USigma V^T, Sigma in mathbb{R}^{r imes r}),(W_1 = USigma U^T,W_2=VSigma V^T)。那么,(mathrm{Tr} W_1 + mathrm{Tr} W_2 le 2y)容易证明,第一个条件这么来玩:
再令(a = U^Tz_1, b = V^Tz_2),可得:
对于任意的(z_1, z_2)成立,所以半正定条件也得证了。
好了,现在来反推:
(|X|_* = sup {mathrm{Tr}(X^TW)||W|le 1}),其中(|cdot|)表示谱范数。
注意(|A|_* le mathrm{Tr}(A)),当(A)为半正定矩阵的时候。
所以
又(|M|_* = sup {mathrm{Tr}(M^TW)||W|le 1}),所以
又
令
容易证明(|W| le 1),所以(mathrm{Tr}(N) = mathrm{Tr}(M^TW)=2|X|_*le 2y),故(|X|_* le y)得证。但愿没出错。。。
然后,论文就给出了第一个定理,关于恢复的:
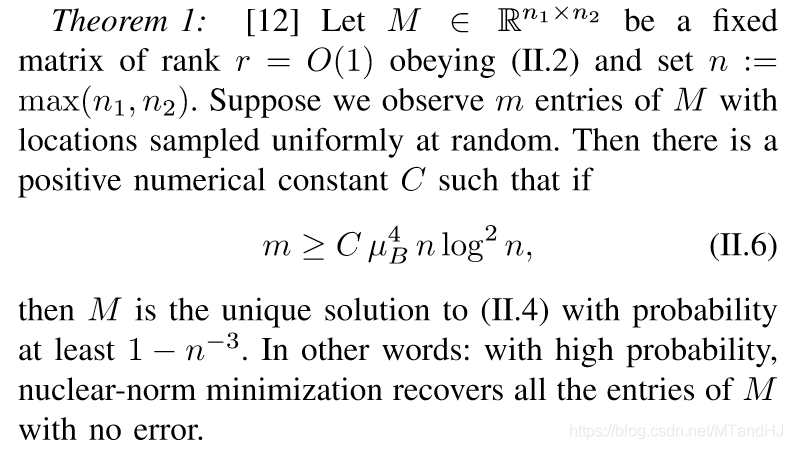
这个结果貌似是之前的工作,,满足一定条件,(M)就会有很大概率被恢复。
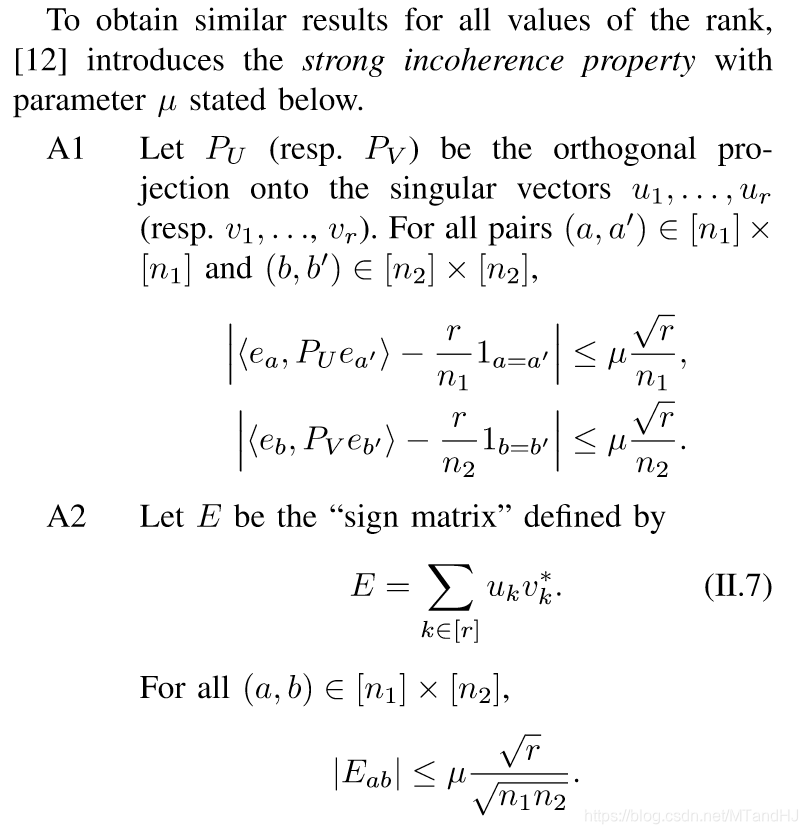
然后呢,论文又提了以下加强版的不连贯条件:
然后有相应的定理2:
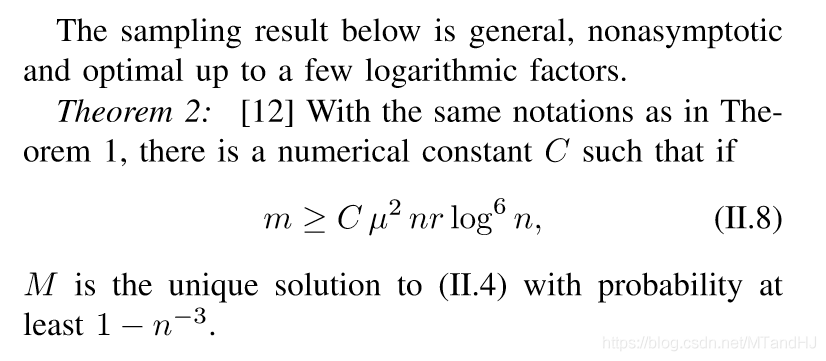
然后跳过。
稳定恢复
用户的评分是不一定正确,不同的场合,不同的天气可能就会给出不同的分数,如果是机器推断的分数那就更是如此了。所以,我们观测的部分数据实际上不一定是(P_Omega (M)),而是(P_Omega (Y) = P_Omega (M+Z)),其中(Z)是类似噪声的存在。
假设,(|P_{Omega}(Z)|_F le delta),求解下列问题:
这个问题同样可以作为SDP求解,假设其解为(hat{M})。有如下定理:
但是问题是,我们从何知道(delta)呢?而在实际操作的时候,作者是求解下述问题:
作者说,这个问题是上面那个问题的对偶结果,饶了我吧,有点像,但是整不出来。然后,不同的情况,作者也给出了(mu)的一些选择。
作者还拿上面的结果和下面的神谕问题进行了比较:

这个神谕,就是指,我们已经知道(X in T)里面了,然后用了对偶还是共轭算子?晕了已经。就这样吧,再看我就得吐了。