该系列为DR_CAN自动控制原理视频笔记,详见https://space.bilibili.com/230105574
由于笔者水平有限,文中难免存在一些不足和错误之处,诚请各位批评指正。
1 一阶系统的例子
对于一个一阶系统,我们通过传递函数得到输入与输出的关系,并对其进行拉普拉斯逆变换,可以得到系统的微分方程。这样的计算只有系统满足零初始条件(0 initial condition)的时候才是正确的:
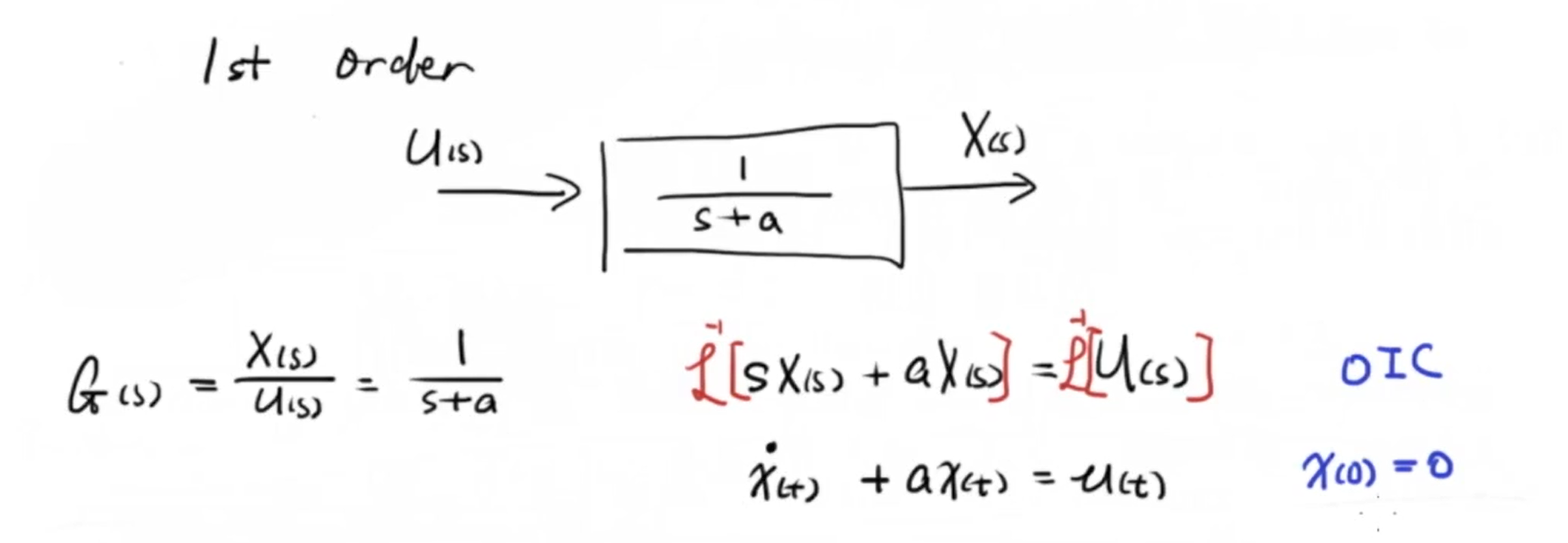
如果系统不满足零初始条件,即 (x(0) eq0) 时,我们仍然按照一般的方式等式两边进行拉普拉斯变换。但在非零初始条件下 (mathcal{L}{dot x(t)} = sX(s)-x(0)) :

我们将传递函数画成框图的形式:
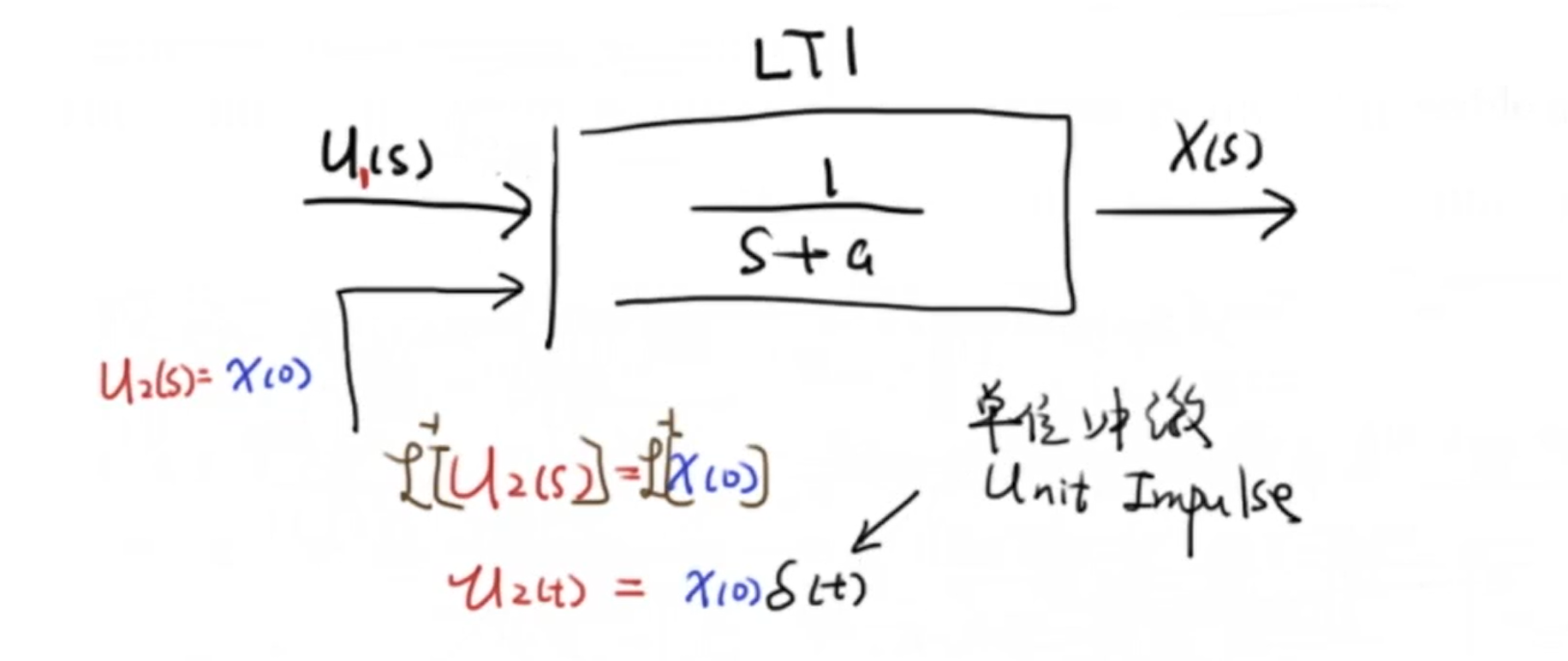
我们令 (U_2(s) = x(0)) 。对该式进行拉普拉斯逆变换可以得到 (u(t)=x(0)delta(t)) ,其中 (delta (t)) 为单位冲激函数。我们发现,当系统不满足零初始条件时,我们仍可以通过相同的传递函数来描述系统。只不过是在输入中加入一个大小为初始条件 (x(0)) 的冲激函数,而这一项并不会影响系统的稳定性和特性。
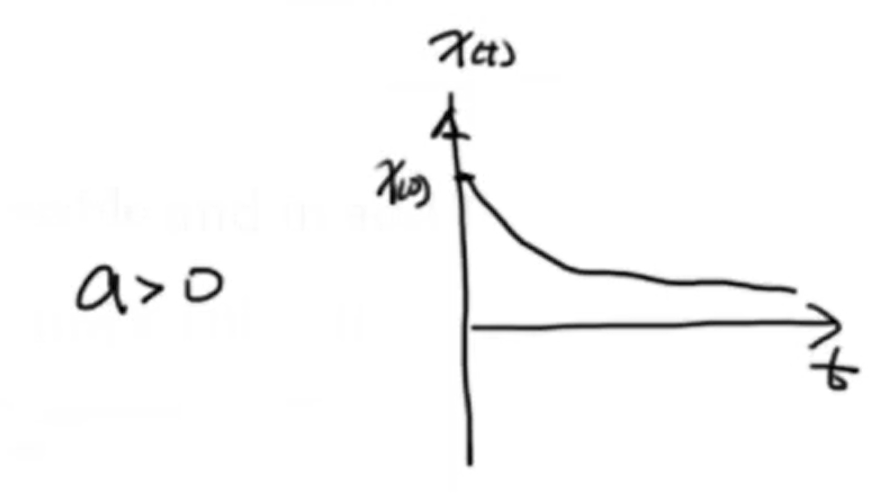
这时系统在0输入下的响应大致就是这样的:
2 更高阶的系统
拉普拉斯变换表:

一阶系统的非零初始条件比较好算,二阶再往上就比较复杂了,这里写一下二阶系统非零初始条件的结果。
设二阶系统的运动方程为:
[a_{0} ddot{x}(t)+a_{1} dot{x}(t)+a_{2} x(t)=b_{2} r(t)
]
对其进行拉普拉斯变换得:
[X(s)=frac{b_{2}}{a_{0} s^{2}+a_{1} s+a_{2}} U(s)+frac{a_{0}[x(0) s-dot{x}(0)]+a_{1} x(0)}{a_{0} s^{2}+a_{1} s+a_{2}}
]
可以看到,随着系统阶数的提高,非零初始条件下的系统输出表示就越复杂,所以在这种情况下我们一般选用状态空间方程来描述系统。