第二章 笔记
图像感知和获取
将照射能量变换为数字图像的传感器配置。
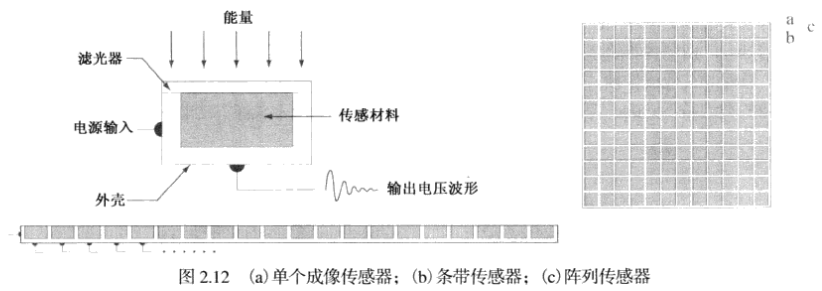
原理:通过将输入电能和特殊类型的检测能源敏感的传感器材料组合,将输入能源转变为电压,传感器再将输出电压数字化,得到数字量。
单个传感器获取图像——将一个激光源和传感器放在一起,使用镜子来控制扫描模式的发射光束,并将反射的激光信号引导到传感器。
条带传感器获取图像——传感器的输出必须由重建算法处理,重建算法的目的是把感知数据转化为有意义的剖面图像。(例如核磁共振成像MRI)
传感器阵列获取图像
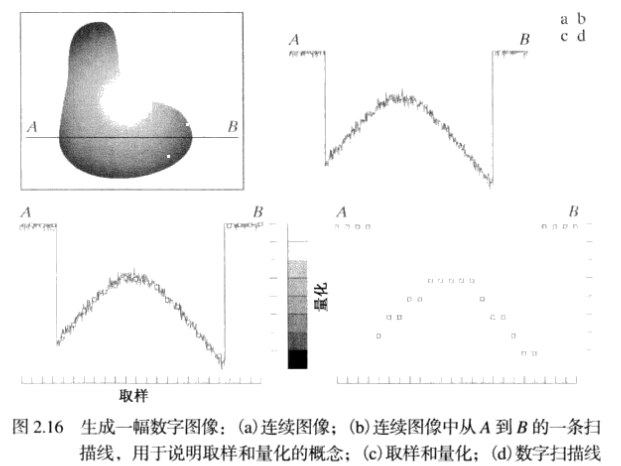
图像的取样和量化
取样——坐标值数字化 ;
量化——对幅值(灰度级)数字化;
数字图像表示
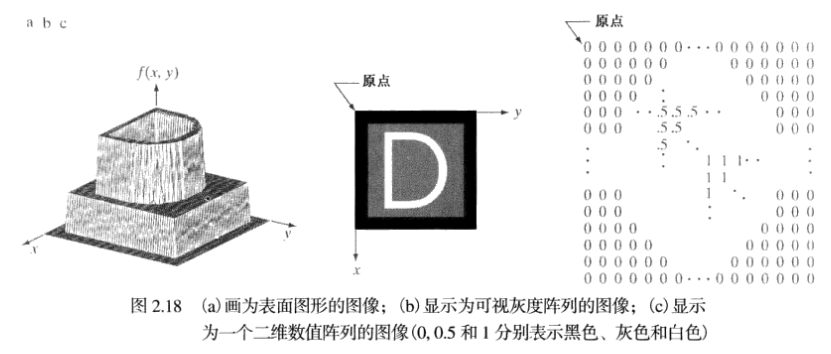
(b,c 表示是最有用的)
图像的离散灰度级
L = 2^k
图像系统的动态范围定义为系统中最大可度量灰度级与最小可检测灰度之比。 上限取决于饱和度,下限取决于噪声。
对比度——图像中最高和最低灰度级间的灰度差。
存储数字图像所需的比特数b为:
b = M * N * k
空间分辨率——图像中可辨别的最小细节的度量。
灰度分辨率——图像中灰度级中可分辨的最小变化。 (一幅被量化为256级的图像有8bit的灰度分辨率)
图像内插——用已知数据来估计未知位置的数值的处理。 (最近邻内插法、双线性内插法,双三次内插)
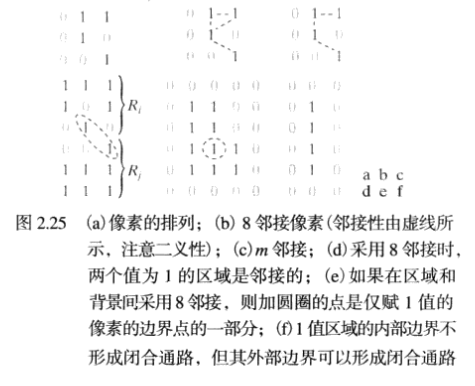
像素间的关系
相邻像素
四邻域和八邻域的像素关系
距离度量——欧式距离、曼哈顿距离、棋盘距离
几何空间变换和图像配准
几何变换:(1)坐标的空间变换; (2)灰度内插,即对空间变换后的像素赋灰度值。
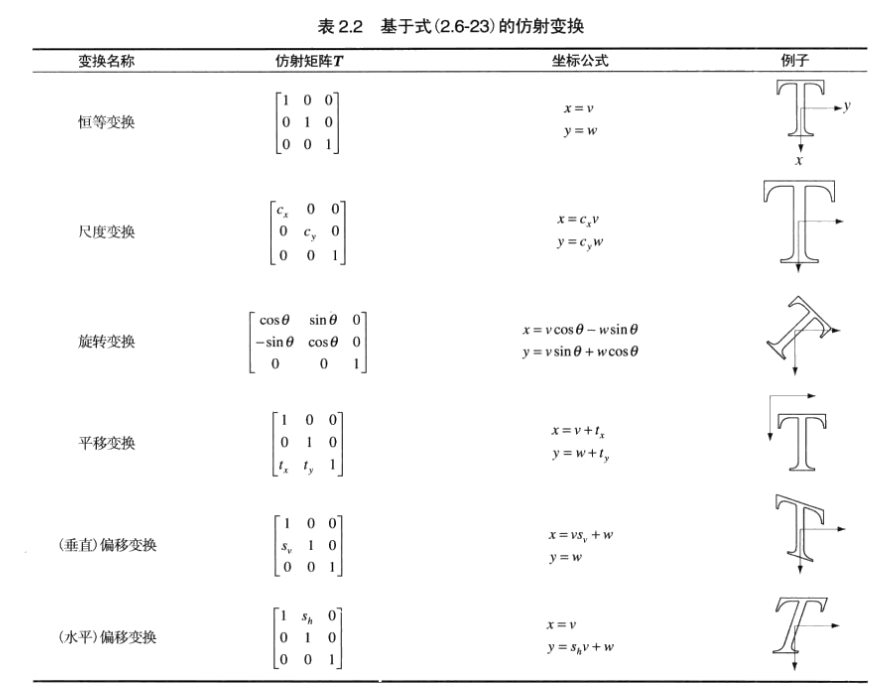
仿射变换
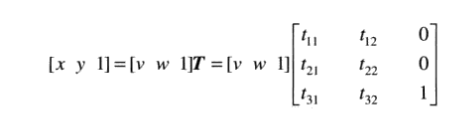
几种坐标映射关系
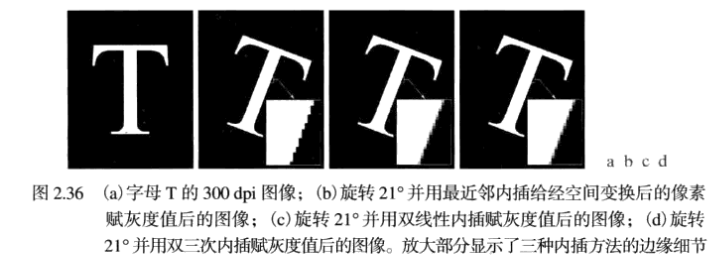
图像旋转与灰度内插
子图像的中间由亮到暗变换所引入的大量垂直块。锯齿边缘效果(最近邻内插>双线性内插>双三次内插)
图像配准
关键:估计变换函数
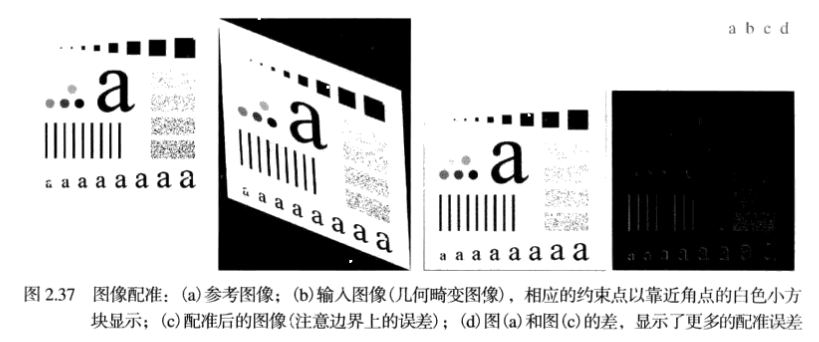
畸变严重时,使用约束点很难完美的匹配。
图像变换
变换一般操作
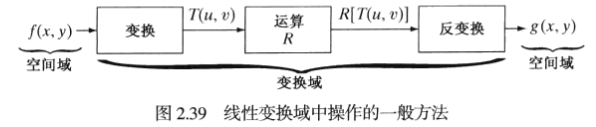
小知识点:变换一般是傅里叶变换,从空间域变换到频域。原因:在空间域下的做卷积相比在频域在乘积操作更加复杂。
图像中的概率方法
概率度量推导灰度变换算法
使用概率和矩阵公式做图像复原
概率用于图像分割
概率描述纹理
概率导出最佳目标识别技术