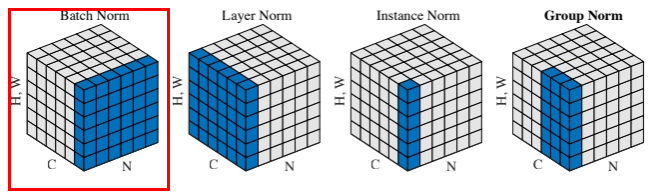
1.Batch Normalization
feature map:$xin mathbb{R}^{N imes C imes H imes W}$ ,包含 N 个样本,每个样本通道数为 C,高为 H,宽为 W。
对其求均值和方差时,将在 N、H、W上操作,而保留通道 C 的维度。
具体来说,就是把第1个样本的第1个通道,加上第2个样本第1个通道 ...... 加上第 N 个样本第1个通道,求平均,得到通道 1 的均值。
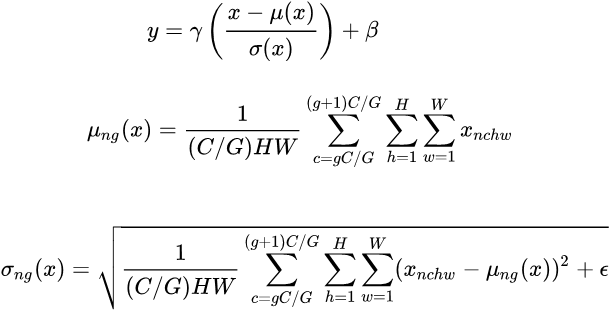
具体计算公式

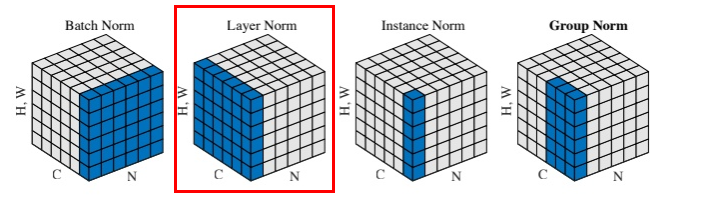
2.Layer Normalization
BN 的一个缺点是需要较大的 batch_size 才能合理估训练数据的均值和方差,这导致内存很可能不够用,同时它也很难应用在训练数据长度不同的 RNN 模型上。
Layer Normalization (LN) 的一个优势是不需要批训练,在单条数据内部就能归一化。

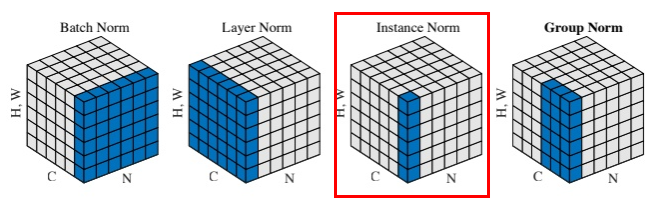
3.Instance Normalization
Instance Normalization (IN) 最初用于图像的风格迁移。
作者发现,在生成模型中, feature map 的各个 channel 的均值和方差会影响到最终生成图像的风格,因此可以先把图像在 channel 层面归一化,然后再用目标风格图片对应 channel 的均值和标准差“去归一化”,以期获得目标图片的风格。

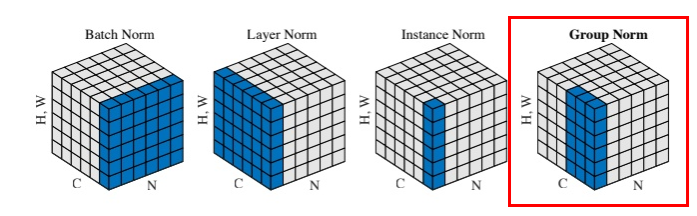
4.Group Normalization
GN 计算均值和标准差时,把每一个样本 feature map 的 channel 分成 G 组,每组将有 C/G 个 channel,然后将这些 channel 中的元素求均值和标准差。各组 channel 用其对应的归一化参数独立地归一化。
Group Normalization (GN) 适用于占用显存比较大的任务,例如图像分割。对这类任务,可能 batchsize 只能是个位数,再大显存就不够用了。而当 batchsize 是个位数时,BN 的表现很差,因为没办法通过几个样本的数据量,来近似总体的均值和标准差。